









by Bekir Sahin and Ahmet Soylu (NTNU)
Various global factors - including, variability in maritime regulations, technological progress, and ecological and environmental problems - have been converging, pointing to the importance of sustainability in the maritime industry. To reduce maritime accidents and the loss of life and property, sustainability needs to be factored into the design of autonomous ships. During the transition from conventional to autonomous ships, all past experience should be transferred to new systems. An anomaly detection system integrated with big data analysis, inference systems and cloud systems can become quite sensitive to maritime accidents.
The evolution of shipping is a gradual process, with progressive technological advances changing how decisions are made, actions initiated, and initiatives taken during navigation and maritime operations. Ships will evolve from human operated to fully autonomous vessels, authority will evolve from human to software and actions taken will evolve from human to systems.
Autonomous ship design and autonomy optimisation have been among the most popular research topics in the maritime literature in recent years [L1]. Automatic Anomaly Detection System (AADS) is an inevitable requirement for unmanned marine vehicles. For this reason, unmanned surface ships are operated either in places where risk is minimal or in experimental scenarios with managed malfunctions, dangers and accidents [L2].
The marine environment is uncertain, complex, and dynamic, with many parameters at play, and shipping operations involve hundreds of possibilities and risks. In addition, a value that is not determined as a risk for a situation can be very risky in another situation and vice versa. For example, an autonomous ship with a predetermined course is expected to deviate from the route against an obstacle and re-enter its route. But if this deviation coincides with the shallow water zone, then grounding can occur. Likewise, an action taken to avoid a known hazard can cause collision, grounding, machine failure, sinking or other accidents. The most important goal in the AADS is to determine the risk level for each action taken by the autonomous ship for all accident scenarios and recommend another action for risk values that are above the threshold values. The lack of a dynamic decision support system for unmanned marine vehicles threatens the safety of both vehicles and the marine environment. The AADS improves the safety of autonomous ships.
Autonomous ships should not only act according to the obstacles detected by the sensor systems, but also have the flexibility to include time, space, manual operation, and new rules. These rules can be determined in the light of past experiences, they can be taken automatically by cloud systems and adapted to the system with the help of artificial intelligence. Data entries can also be made manually. In the AADS model (Figure 1 (a)), inputs are obtained via sensor systems, the data and the risk structures of maritime accidents are collected in the database, and the data are processed via software.
AADS modifies and converts sensor data into risk possibilities. Risk possibilities are used to find the risk probabilities by using the risk structures. The structure of a risk model is given in Figure 1 (b). For example, a risk structure might be a collision, of which there are many different kinds. Therefore, the risk structures should be as flexible and comprehensive as possible. All possible scenarios are stored in the database to determine the accident risk at all times and locations. The mathematical logic behind the relationships requires an expertise and comprehensive analysis based on previous experience. Fuzzy systems for Bayesian networks, safety models such as fault tree analysis or T-S models are some of solutions for creating the risk structures [1, 2]. The risk probabilities are the decision parameters of AADS. If the threshold is exceeded, immediate action is taken.
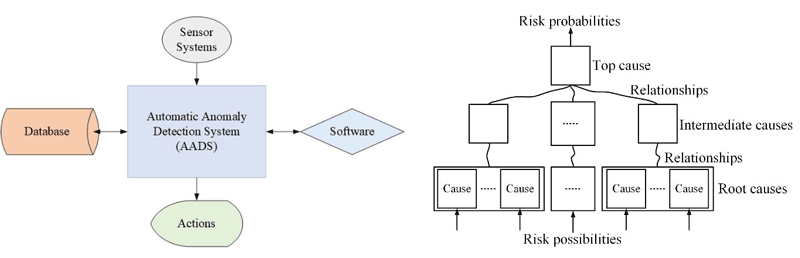
Figure 1: AADS model. Left (a) General framework of AADS for fully autonomous ships, right (b) Form of Risk Structures for AADS.
In the context of an ERCIM funded work, we focus on optimisation algorithms and quantitative decision support systems for maritime supply chains. We are currently working to improve the real-time continuous fuzzy fault tree analysis model [1].
Links:
[L1] https://www.rolls-royce.com/media/press-releases/2018/15-10-2018-rr-and-intel-announce-autonomous-ship-collaboration.aspx
[L2] https://www.finferries.fi/en/news/press-releases/finferries-falco-worlds-first-fully-autonomous-ferry.html
References:
[1] Y. E. Senol, B. Sahin: “A novel real-time continuous fuzzy fault tree analysis (RC-FFTA) model for dynamic environment”, Ocean Engineering, 127, 70-81, 2016.
[2] H. Pan, W. Yun: “Fault tree analysis with fuzzy gates”, Computers & industrial engineering, 33(3-4), 569-572, 1997.
Please contact:
Bekir Sahin, NTNU, Norway

