









by Bernard Girau (Université de Lorraine), Benoît Miramond (Université Côte d’Azur), Nicolas Rougier (Inria Bordeaux) and Andres Upegui (University of Applied Sciences of Western Switzerland)
SOMA is a collaborative project involving researchers in France and Switzerland, which aims to develop a computing machine with self-organising properties inspired by the functioning of the brain. The SOMA project addresses this challenge by lying at the intersection of four main research fields, namely adaptive reconfigurable computing, cellular computing, computational neuroscience, and neuromorphic engineering. In the framework of SOMA, we designed the SCALP platform, a 3D array of FPGAs and processors permitting to prototype and evaluate self-organisation mechanisms on physical cellular machines.
The tremendous increase in transistor integration in recent years has reached the limits of classic Von Neuman architectures. Nonetheless, one major issue is the design and deployment of applications that cannot make optimal use of the available hardware resources. This limit is even more acute when we consider application domains where the system evolves under unknown and uncertain conditions, such as mobile robotics, IoT, autonomous vehicles or drones. In the end, we cannot foresee every possible context that the system will face during its lifetime, thus making it impossible to determine the optimal hardware substrate. Interestingly, the biological brain has solved this problem using a dedicated architecture and mechanisms that offer both adaptive and dynamic computations, namely, self-organisation [2].
However, even though neuro-biological systems have often been a source of inspiration for computer science, the transcription of self-organisation at the hardware level is not straightforward, presenting several challenges. We are working on coupling this new computational paradigm with an underlying conventional systolic architecture [1]. We use self-organised neural populations on a cellular machine where local routing resources are not separated from computational resources; this ensures natural scalability and adaptability as well as a better performance/power consumption trade-off compared to other conventional embedded solutions. This new computing framework may indeed represent a viable integration of neuromorphic computing into the classical Von Neumann architecture and could endow these hardware systems with novel adaptive properties [3].
Cortical plasticity and cellular computing in hardware
This objective led us to study a desirable property from the brain that encompasses all others: cortical plasticity. This term refers to one of the main developmental properties of the brain where the organisation of its structure (structural plasticity) and the learning of the environment (synaptic plasticity) develop simultaneously toward an optimal computing efficiency. This developmental process is only made possible by some key features: the ability to focus on relevant information, representation of information in a sparse manner, distributed data processing and organisation fitting the nature of data, leading to a better efficiency and robustness. Our goal is to understand and design the first artificial blocks that are involved in these principles of plasticity. Hence, transposing plasticity and its underlying blocks into hardware is a step towards to defining a substrate of computation endowed with self-organisation properties that stem from the learning of incoming data.
The neural principles of plasticity may not be sufficient to ensure that such a substrate of computation is scalable enough in the face of future massively parallel devices. We anticipate that the expected properties of such alternative computing devices could emerge from a close interaction between cellular computing (decentralisation and hardware compliant massive parallelism) and neural computation (self-organisation and adaptation). We also believe that neuro-cellular algorithmics and hardware design are so tightly related that these two aspects should be studied together. Therefore, we propose to combine neural adaptivity and cellular computing efficiency through a neuro-cellular approach of synaptic and structural self-organisation that defines a fully decentralised control layer for neuromorphic reconfigurable hardware. To achieve this goal, the project brings together neuroscientists, computer science researchers, hardware architects and micro-electronics designers to explore the concepts of a Self-Organizing Machine Architecture: SOMA (see Figure 1). This self-organisation property is already being studied in various fields of computer science, but we are investigating it in an entirely new context, applying perspectives from computational neuroscience to the design of reconfigurable microelectronic circuits. The project focuses on the blocks that will pave the way in the long term for smart computing substrates, exceeding the limits of current technology.
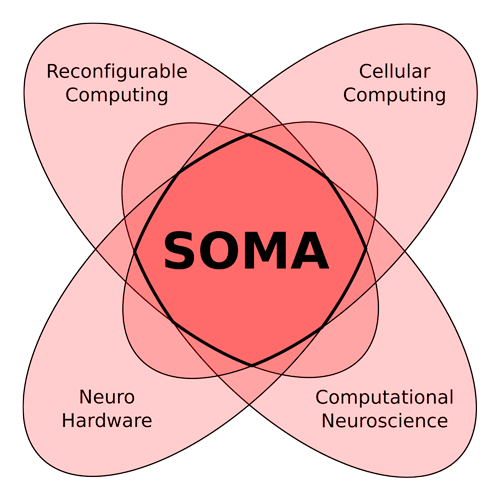
Figure 1: SOMA is a convergence point between past research approaches toward new computation paradigms: adaptive reconfigurable architecture, cellular computing, computational neuroscience, and neuromorphic hardware.
Convergence of research fields
Previous work has explored the possibility of using neural self-organising models to control task allocation on parallel substrates [1], while adapting neural computational paradigms to cellular constraints. Adaptive reconfigurable computing focuses on virtualisation of reconfigurable hardware, runtime resource management, dynamic partial reconfiguration, and self-adaptive architectures. Cellular approaches of distributed computing result in decentralised models that are particularly well adapted to hardware implementations. However, cellular computation still lacks adaptation and learning properties. This gap may be filled with the help of computational neuroscience and neuromorphic engineering through the definition of models that exhibit properties like unsupervised learning, self-adaptation, self-organisation, and fault tolerance, which are of particular interest for efficient computing in embedded and autonomous systems. However, these properties only emerge from large fully connected neural maps that result in intensive synaptic communications.
Our self-organising models are deployed on the Self-configurable 3-D Cellular multi-FPGA Adaptive Platform (SCALP) (Figure 2), which has been developed in the framework of the SOMA project. SCALP is a multi-FPGA hardware platform that enables the creation of prototype 3D NoC architectures with dynamic topologies. A node is composed of a Xilinx Zynq SoC (dual-core ARM Cortex-A9 @866 MHz + Artix-7 programmable logic with 74,000 cells), 2 Gb DDR3 SDRAM, a 5-port Ethernet switch, and a PLL. The inherent cellular scalable architecture of SCALP, coupled with its enhanced interfaces, provides the ideal computation platform for implementing cellular neuromorphic architectures by imposing real physical connectivity constraints. Also, a real 3D machine architecture (instead of a simulated one) can better handle scalability issues when modelling dynamic bio-inspired 3D neural connectivity. We have already proposed such models using both dynamical sprouting and pruning of synapses inside a self-organising map and a method to migrate neurons between clusters to dynamically reassign neurons from one task to another. These methods provide dynamic structural and computational resource allocations, inspired by the brain’s structural and functional plasticity, and are currently being deployed onto the SCALP platform.
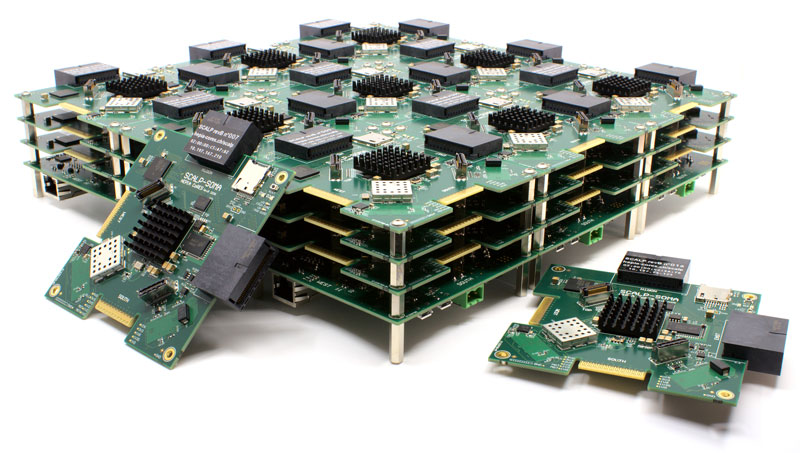
Figure 2: The SCALP platform, a set of FPGAs and processors with 3D topology, was designed to evaluate self-organisation mechanisms on cellular machines. Algorithms based on cellular self-organising maps are the basis of the self-adaptation properties.
Links:
[L1] https://anr.fr/Project-ANR-17-CE24-0036
[L2] https://gitedu.hesge.ch/soma/scalp_board/-/wikis/home
References:
[1] L. Rodriguez, B. Miramond, B. Granado “Toward a sparse self-organizing map for neuromorphic architectures”, ACM Journal on Emerging Technologies in Computing Systems (JETC) 11 (4), 1-25, 2015.
[2] G.I. Detorakis, N.P. Rougier: “A Neural Field Model of the Somatosensory Cortex: Formation, Maintenance and Reorganization of Ordered Topographic Maps”, PLoS ONE 7, 7, e40257, 2012.
[3] A. Upegui, et al.: “The Perplexus bio-inspired reconfigurable circuit”, in Proc. of the Second NASA/ESA Conference on Adaptive Hardware and Systems, 2007.
Please contact:
Nicolas Rougier
Inria Bordeaux Sud-Ouest, France,
+33 7 82 50 31 10

