









by Alessio Iovine, Elena De Santis, Maria Domenica Di Benedetto (University of L’Aquila) and Rafael Wisniewski (Aalborg University)
The safety issues associated with autonomous vehicles necessitate more robust and reliable solutions for Adaptive Cruise Control (ACC). A human-inspired hybrid model with the design goal of replacing and imitating the behaviour of a human driver is being developed, ensuring an appropriate safety level while respecting comfort.
The sixty year old research field of traffic control has recently been addressing the ultra-modern subject of autonomous vehicle control. The main goal of traffic control is to optimise traffic management with respect to a number of variables, including congestion, emissions, travel time reduction and safety. To this end, Adaptive Cruise Control (ACC) systems were envisioned. Once introduced, these tools need to conform to normal traffic dynamics, consequently they will need to resemble a human driver’s behaviour.
Properties of hybrid systems, which encompass both continuous and discrete time dynamics evolution, allow for implementation of the complex modelling of the human way of driving. Our approach considers a number of control laws, one for each different situation, and embeds them in a unique model obtaining a mesoscopic hybrid model, i.e., a microscopic hybrid model that takes into account macroscopic parameters [1]. Indeed, environmental information is used to better represent human characteristics, defining a model closer to reality. The macroscopic information can either be provided by a centralised traffic supervisor, or it can be gathered, elaborated and transmitted by the vehicles themselves, when they are connected and can exchange information.
The resulting ACC system processes information about other vehicles and takes decisions about braking or throttle actions on the basis of a human-inspired model, with the purpose of safely controlling single vehicle dynamics in relation to a car in front. The framework considered in [1] is deterministic, and the next step is to consider stochastic processes, giving a definition of safety with respect to a probability measure, and using new techniques producing barrier functions for a risk acceptance probability [2]. The objective is to define the minimum distance between two vehicles which allows collision avoidance with a given desired probability. The barrier functions calculated in [1] will then change, while the hybrid system structure imitating the human driver is preserved.
Our research is also investigating bio-inspired robots, with the aim of imitating and reproducing the natural behaviour of a living being. This allows us to include a human driver in the control loop, reproducing the adaptability to various conditions and comfort, while maintaining the full controllability of the system and avoiding human weaknesses, such as mistakes or distractions.
The first purpose of the model is to provide information to the human driver about which risk level applies to a given situation, which will enable the driver to select the appropriate balance between safety and performance. The autonomous vehicle will react according to the chosen setup.
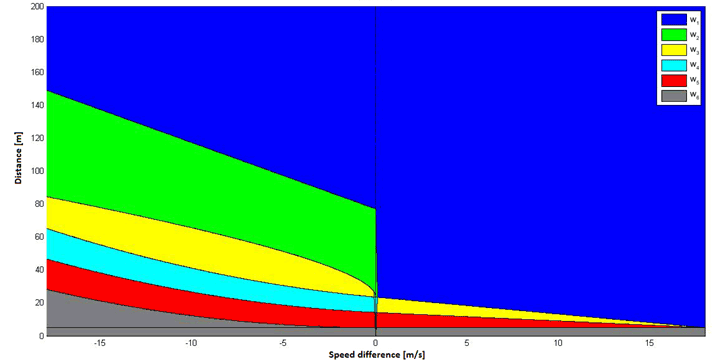
Figure 1: The interaction zone split in different regions.
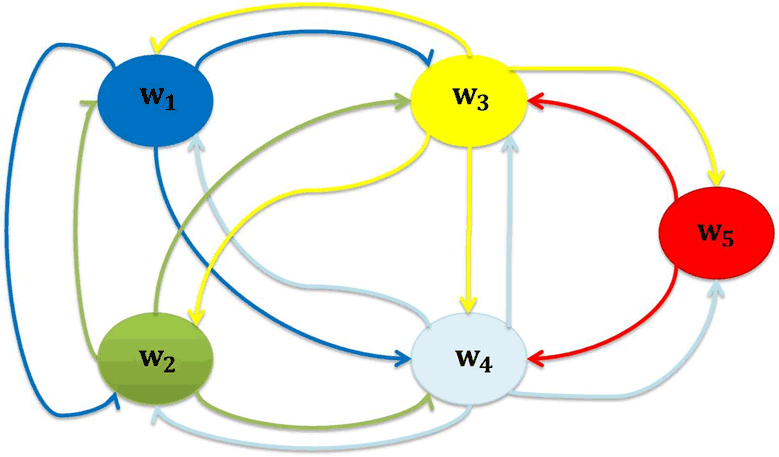
Figure 2: The possible discrete transitions resulting in the considered hybrid system.
The model has a range of potential applications. First, it makes it possible to fix a probability safety minimum range that should be respected by autonomous vehicles; this would lead to improvements both from a single vehicle point of view and for traffic flow (in fact, the presence of a single dangerous vehicle on the road has a negative impact on the entire flow). Furthermore, the considered model could reduce legal disputes between owners of autonomous vehicles and the car manufacturing industry: vehicles could have a completely safe setting as default with the option for the owner to modify it. In the case of an accident, the responsibility is in the hands of the driver who chose the risk level. It must be noted that in a competitive world where autonomous vehicle sales may depend in part on their potential to engage in truly dangerous situations, it is essential to set a minimum legal safety range to avoid a race among vehicle manufacturers.
Link:
http://safecop.deib.polimi.it/
References:
[1] A. Iovine, et al.: “Safe human-inspired mesoscopic hybrid automaton for autonomous vehicles”, Nonlinear Analysis: Hybrid Systems,
http://dx.doi.org/10.1016/j.nahs.2016.08.008
[2] C. Sloth, R. Wisniewski: “Safety Analysis of Stochastic Dynamical Systems”, IFAC-PapersOnLine, Volume 48, Issue 27, 2015, Pages 62-67, ISSN 2405-8963,
http://dx.doi.org/10.1016/j.ifacol.2015.11.153
Please contact:
Alessio Iovine, Elena De Santis, Maria Domenica Di Benedetto
Center of Excellence DEWS, University of L’Aquila, Italy
Rafael Wisniewski
Aalborg University, Denmark

