









by Daniel Watzenig (Virtual Vehicle Research Center, Graz)
Automated vehicle technology has the potential to be a game changer on the roads, altering the face of driving as we know it. Many benefits are expected, ranging from improved safety, lower stress for car occupants, social inclusion, reduced congestion, lower emissions, and more efficient use of roads due to optimal integration of private and public transport.
Over the last three years, public authorities from many countries have presented action and innovation plans to facilitate the development and stepwise introduction of automated vehicles. Those plans cover actions for a multitude of technical and non-technical aspects that need to be taken into account. Several forecasts predict a limited availability of automated driving functions by 2020 (partial and conditional automation) and a wide availability by 2040 including high and full automation [1], [2], [3].
In particular, substantially improved vehicle and road safety is one of the expected major achievements. However, the ultimate safety test for automated vehicles will have to determine how well they can replicate the crash-free performance of human drivers, especially at the level of partial and conditional automation within mixed traffic. In order to be accepted by drivers and other stakeholders, automated vehicles must be reliable and significantly safer than today’s driving baseline.
Automated vehicles by nature rely on sensing, planning, reasoning, and acting (or re-acting). A suite of vehicle sensors based on different sensing modalities (such as radar, lidar and camera) along with external sources (V2X) and detailed digital maps gather raw data of the vehicle’s environment, driving situation, and ambient conditions. Sophisticated algorithms interpret the data, process it, and convert it to commands for the actuators (steering, braking). Most of the state-of-practice vehicles and prototypes rely on in-vehicle sensors and require little digital infrastructure communication while a greater connectivity between vehicles and their infrastructure is known to be beneficial. This entails the development of common communication protocols, security standards, and investment in new types of infrastructure or upgrade of existing ones. Reproducible testing of such highly connected, cooperative, bi-directionally interacting, and automated systems of systems has become one of the biggest challenges.
Figure 1 highlights the complex architecture that has to be designed, implemented, validated, and finally qualified for automotive purposes (ISO 26262 and ISO PAS 21448 SOTIF). Reliability and safety (for occupants and other road users) have to be guaranteed at any time, in any weather conditions, and in any traffic situation.
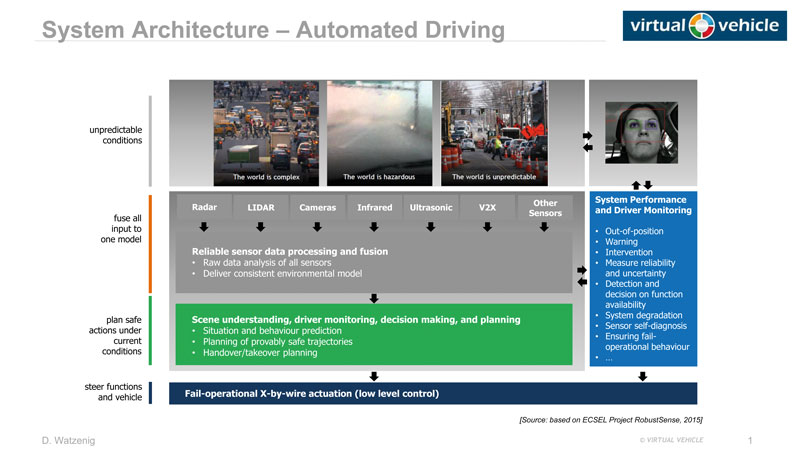
Figure 1: Automated driving architecture.
As the technology for automated driving develops, the research and development focus is shifting from basic research towards demonstration of technological readiness and 24/7 availability of functions and systems.
The shift of automated driving to the next level of maturity requires several technological advances and fields of action including (but not limited to):
- Fail-operational behaviour (multiple redundancy at low cost)
- Assessing safety, reliability, and robustness (independent and reproducible test)
- Harmonised driving scenarios (set of agreed test scenarios)
- Self-learning, self-adapting, self-configuring architectures (qualifiable and certifiable)
- Demonstrating cybersecurity and privacy
- Dependable power computing (1 GByte/s of data has to be processed in real-time)
- Human factor (especially for SAE J3016 level 3)
- Environment modelling and perception in real-time
- Advanced data fusion (low, intermediate, high level fusion) and robust control
- Digital infrastructure embedding
- Real-world data-driven engineering feedback.
Despite tremendous improvements in sensor technology over the last couple of years, pattern recognition techniques, robust signal processing, control system design, computational power (multi-core and many-core technology), V2X, and other system technology areas, market introduction of a fully automated vehicle that is capable of unsupervised driving in an unstructured environment still remains a long-term goal. Even for structured environments, further research is needed to exploit the full potential of road transport automation.
One of the keys to succeed is the tight engagement of real-world data and virtual development methods to design new or to improve existing vehicle functions and features as well as methods, processes, and tools for development and validation. Figure 2 highlights the ‘closed engineering loop’ in order to improve methods, tools, and processes for virtual approval.
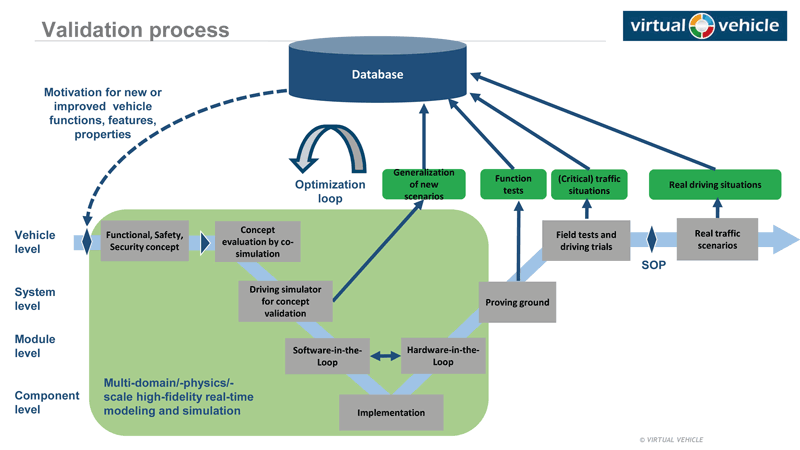
Figure 2: The use of real-world data to develop and test safety-critical automated driving functions.
Seamlessly connecting models, data, and processes with openness to a certain extent along the entire vehicle life-cycle will significantly contribute to a decrease in road driving test kilometres, to lower development costs, and ultimately to improved reliability and safety. Austria has already reacted in order to strengthen its position within Europe. The Austrian Federal Ministry for Transport, Innovation, and Technology (BMVIT) has launched a call to set up and run a public test region for automated vehicles. All relevant industrial and academic partners from the automotive and infrastructure domains have joined forces and are on the way to establishing the Austrian Lightvehicle Proving ground (ALP.Lab) starting in 2017 which will cover motorways, federal highways, urban areas, and border crossings to Slovenia.
All of the above mentioned fields of activity need to be further investigated to exploit the full potential in order to ensure a safe, reliable, acceptable, and secure behaviour of automated vehicles embedded in their intelligent environment at all times. Along with the technological advances, progress in legislation, liability, and insurance is essential and urgently needed.
Meanwhile many collaborative European research projects focusing on different aspects of automated driving have been recently launched (e.g., ENABLE-S3, Inframix, TrustVehicle and AutoDrive) and several European initiatives (like ECSEL JU, EARPA, ERTRAC and SafeTRANS) are driving this topic forward, finally reflecting the strong European movement in the field of automated driving.
Recommended reading:
D. Watzenig, M. Horn, Automated driving – safer and more efficient future driving, Springer, ISBN 978-3-319-31895-0, http://www.springer.com/de/book/9783319318936, 2016.
References:
[1] Automated driving roadmap, European road transport research advisory council (ERTRAC), 2015.
[2] Roadmap on smart systems for automated driving, European technology platform on smart systems integration (EPoSS), 2015.
[3] ECSEL Austria, Austrian research, development & innovation roadmap for automated vehicles, http://www.ecsel-austria.net/newsfull/items/automated-driving-roadmap.html, March 2016.
Please contact:
Daniel Watzenig, Virtual Vehicle Research Center, Graz, Austria

