









by Christophe Ponsard, Philippe Massonet and Gautier Dallons (CETIC)
There is a strong move towards assisting the driver, and even relieving the driver from driving duties, in various modes of transportation, including autonomous car, train and aircraft operation. Successive levels of automation are progressively shifting responsibility from the driver to the vehicle. We present a brief comparative analysis of automation levels in the automotive, railway and aeronautic domains with a focus on how to keep the human in the loop both at design and run-time.
Mobility is a key dimension of our daily lives both for work and personal duties. Ensuring safe, rapid, predictable and affordable transportation is quite challenging because our transportation networks are under high load, especially at peak hours. The level of performance that can be achieved is often limited by the human driver; the inherent constraints being reaction time (resulting in triggering jams), reliability (90% of car accidents are a result of human error) and also economic cost. Airlines, railway and car manufacturers have consequently worked to assist the driver by reducing the driver’s work and are even considering the ultimate goal of going driverless.
Different levels of automation have been defined in each transportation domain. Table 1 gives a comparative overview of those levels with related automation features and the respective split of responsibility between the system and human driver/pilot. The automotive SAE classification [url1] was used as reference framework to align railway grades of operation (GoA) [url2] and aircraft levels of automation [url3]. The lowest level is fully manual driving, although even this level generally includes some safety protection systems. Vehicles in the next level up provide assistance in specific or time-bounded tasks. While cars are currently only reaching partial automation, railways and airplanes have already achieved much higher levels, e.g., fully autonomous metro lines.
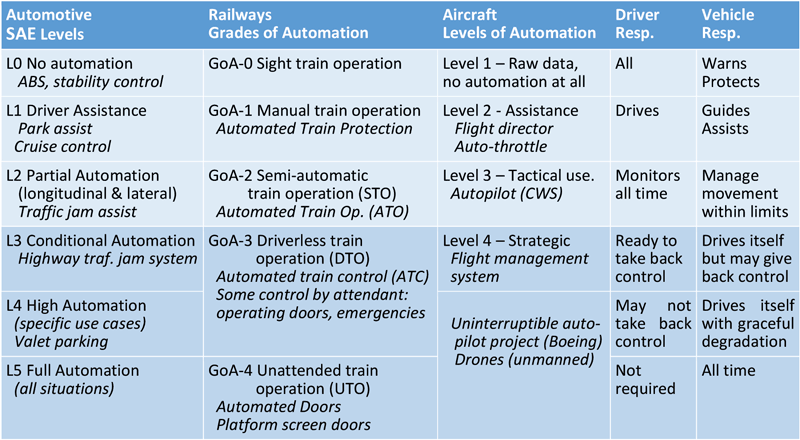
Table 1: Comparison of automation levels in automotive, railways and aeronautics.
The automotive industry is now considering the critical transition to a level where the car is able to drive itself so the driver has no need to steer, brake, accelerate or watch the road. However, as the system cannot cope with all situations, the driver must be ready to resume operation when instructed. This is quite challenging because several obstacles have to be carefully addressed [1]. Our work on this topic relies on requirements engineering techniques [2], based both on characteristics from the human driver and on the transposition of known problems in other domains. Some interesting issues to address are the following:
- Situation awareness: the system needs to make sure the driver has a correct mental picture of the environment when handing back control. This is more difficult to achieve when driver focus has switched to non-driving duties.
- Human reaction abilities: raising the alarm at short notice is dangerous because the driver will not be able to fully analyse the situation or even go into panic. The system needs to anticipate known events (e.g., motorway exit in five kilometres), pre-crash scenarios (e.g., suspicious car behaviour ahead) and also report about degradation of its performance (e.g., due to weather or road conditions). This also enables the driver to increase their situation awareness as required.
- Warning annoyance: driver trust in the system can rapidly decrease if the system sounds alarms at inappropriate times or generates too many warnings.
- Task inversion: the driver might switch to a mode where his focus is only on monitoring alarms and not paying attention to the real world situation.
Based on such an analysis, specific strategies can be designed and experimented. The whole system should not be seen as static but rather an evolving cooperation between the driver and the vehicle with learning occurring on both sides. In this regard, machine learning techniques can play an important role for making sure the driver and the system are operating optimally together [3]. With the advent of connected car, this driving experience (especially problematic scenarios) will easily be reported, analysed and enhanced. Our future work will focus more specifically on the railway domain in the context of INOGRAMS project objectives related to automated train operation, especially for high efficiency [4]
Links:
[L1] http://templatelab.com/automated-driving/
[L2] http://tiny.cc/uitp-goa
[L3] http://tiny.cc/nbaa-flight-automation
[L4] https://www.cetic.be/INOGRAMS-2104
References:
[1] S. M. Casner, et al.: “The Challenges of Partially Automated Driving”, Communications of the ACM, 59(5):70-77, 2016
[2] A. van Lamsweerde: “Requirements Engineering: From System Goals to UML Models to Software Specifications”, Wiley, 2009.
[3] P. Koopman, M. Wagner: “Challenges in Autonomous Vehicle Testing and Validation”, SAE Int. J. Trans. Safety 4(1):15-24, 2016.
Please contact:
Christophe Ponsard
CETIC, Belgium
+32 472 56 90 99

