









by Zsolt Szalay, Domokos Esztergár-Kiss, Tamás Tettamanti (Budapest University of Technology and Economics) and Péter Gáspár, István Varga (SZTAKI)
RECAR is a Hungarian research centre for autonomous vehicle technology providing internationally unique education and research with close cooperation with industrial partners. The research centre has technologically advanced laboratories to facilitate high quality R+D+I activities. RECAR is also expected to contribute to the increase in qualified workforce in the automotive industry in Hungary. Info-communication technology is creating big changes in road transportation (vehicles, infrastructure, and passengers) as well as society in general [1]. In the automotive industry, continuous expansion of automation is occurring [2]. In Hungary to date, research projects in the field of autonomous vehicles have been performed separately and in parallel, with little collaboration between institutes.
RECAR (REsearch Centre for Autonomous Road vehicles) is a comprehensive organisation that helps its members to combine their expertise to improve research outcomes. RECAR’s aim is to connect academic and industrial expertise, as well as education and research, in order to facilitate the training of highly qualified professionals and to strengthen research competences. As a first step in establishing RECAR, in January 2016 the leaders of Budapest University of Technology and Economics (BME), Eötvös Loránd University (ELTE) and Hungarian Academy of Sciences, Institute for Computer Science and Control (MTA SZTAKI) signed the RECAR program’s collaboration agreement.
Based on international trends and incentives of national companies in the automotive industry, the partners initiated two new master programs (MSc): Autonomous Vehicle Control Engineering hosted by BME and Computer Science for Autonomous Driving hosted by ELTE. The foundations for the master programs have already been laid down and the detailed education plans are on the way together with the elaboration of course materials. Importantly, the master programs were jointly defined by both academic and industrial partners in order to address real industry needs. The programs will be launched by 2018.
Laboratories that go beyond the state of the art are required to perform education and research in the area of autonomous vehicle technology. The partners have defined a testing and validation structure of five layers [3], including laboratories that serve both educational and research needs (Figure 1). The laboratory tests are composed of technology research labs, component analysis labs, system integration labs, and last but not least a vehicle-in-the-loop lab. The labs will have unique and high quality equipment with most of the functionalities required for autonomous vehicle development and testing.
![Figure 1: Autonomous vehicle testing and validation layers [3].kiss2](/images/stories/EN109/kiss2.jpg)
Figure 1: Autonomous vehicle testing and validation layers [3].

Figure 2: Example research topics.
Several new research projects, which take advantage of the technology offered by these innovative laboratories, will begin in the near future (Figure 2). The research topics were defined based on current international trends as well as initiatives of the industrial partners. The research topics also reflect the EU’s recent Gear 2030 body activities that aim to formulate a harmonised and competitive European vision for the ‘Connected Car and Automated Driving’. Accordingly, the work will be realised in the form of ongoing industrial projects and research collaboration by seven main research groups (with examples):
1. Development of autonomous vehicle demonstration platform:
- autonomous vehicle prototype development
- demonstration of autonomous functions;
2. Control of autonomous vehicles:
- cooperative vehicle control
- optimal trajectory planning
- cooperative navigation
- vehicle motion measurement and estimation;
3. Communication systems within and among vehicles:
- wireless communication of vehicles (V2X)
- distributed measurement and information processing cyber security of autonomous vehicles;
4. Environment sensing of autonomous vehicles:
- optimal sensor architecture
- environment sensing based on multi-sensor fusion
- radar-sensor based target classification;
5. Intelligent transportation systems:
- advanced road traffic control
- energy consumption optimisation
- urban parking and space management;
6. Interaction of human and autonomous vehicles:
- information management
- human factors
- liability of autonomous vehicles;
7. Testing and validation of autonomous vehicles: relevant research subjects to the test track.
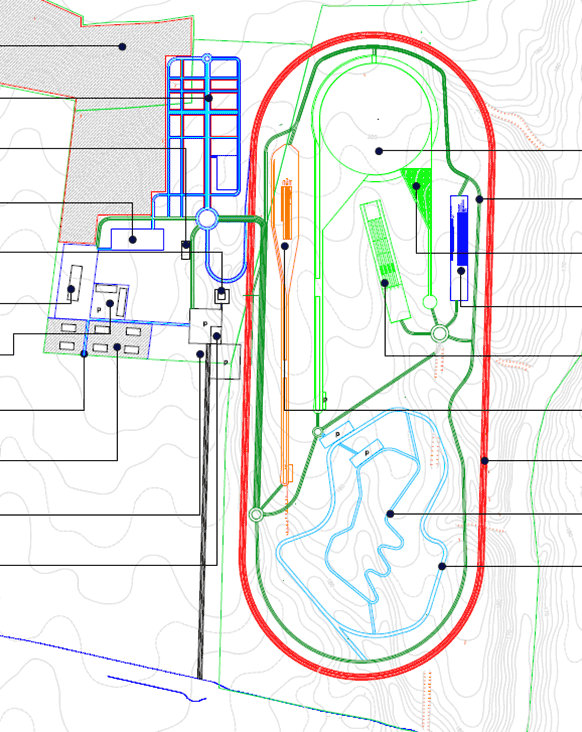
Figure 3: Automotive proving ground dedicated to autonomous vehicle testing and validation at Zalaegerszeg.
A new test track will also be established beside the research centre (close to the city of Zalaegerszeg, Hungary) through an investment of 130 million Euros by 2019. The planned proving ground (Figure 3) is specifically dedicated to testing autonomous vehicle functionalities in an urban environment (with general roadside objects, city traffic elements, building facades and traffic infrastructure). The 250 ha area will incorporate the following test features:
- standard vehicle dynamics testing and validation,
- fully integrated autonomous vehicle testing and validation,
- environment preparation (obstacles, traffic signs, traffic control, other vehicles, vulnerable road users),
- complex driving and traffic situations,
- Smart City features,
- from prototype testing through to series production testing and validation.
The use case vision is level 4 autonomous driving from suburban home to city office and valet parking (rural road, highway traffic, suburban area, city environment with continuous transition) [3].
Link: http://recar.bme.hu/eng
References:
[1] T. Tettamanti, I. Varga, Zs. Szalay: “Impacts of autonomous cars from a traffic engineering perspective”, Periodica Polytechnica ser. Transp. Eng., 2016, Vol. 44. No.4. pp. 244-250, doi: 10.3311/PPtr.9464I
[2] A. Alessandrini, et al.: “Automated Vehicles and the Rethinking of Mobility and Cities”, Transportation Research Procedia, 2015, Vol. 5, pp. 145-160, ISSN 2352-1465, http://dx.doi.org/10.1016/j.trpro.2015.01.002.
[3] Zs. Szalay: “Structure and Architecture Problems of Autonomous Road Vehicle Testing and Validation”, 15th Mini Conference on Vehicle System Dynamics, Identification and Anomalies – VSDIA 2016, 2016.
Please contact:
Domokos Esztergár-Kiss
Budapest University of Technology and Economics, Hungary
+36-1-463-1029

