









by Baran Cürüklü (Mälardalen University), José-Fernán Martínez-Ortega (Universidad Politécnica de Madrid) and Roberto Fresco (CREA)
Machines are going to become smarter with autonomy as the new standard. Consequently, new services will emerge. For this to happen, however, we need a new approach to autonomy, which assumes different levels – and perhaps more importantly, machines that can handle these different levels. Adaptive autonomy is a means to achieving this goal.
One of the major challenges in future robotics is to design systems that can collaborate with each other. This is radically different from classical robot automation in which industrial robots, protected by fences, carry out repetitive tasks. The societal impact of these advances is not hard to imagine. In this context, precision agriculture is a highly relevant application domain that is going to be subject to disruptive innovations. The effects of climate change are already influencing access to arable land and world population growth needs to be taken into account. Thus, there is a real risk of food shortage in the future if we do not develop autonomous systems that can collaborate to solve real-world complex problems. There is also a societal dimension to agriculture. If we look at agriculture and its short-term challenges, we see that in many industrial countries the depopulation of rural areas makes it harder to find skilled labour. This, despite that fact that only 2-5% of the total work force work is in this sector. With depopulation comes reduced investment in these regions – in infrastructure, for example. A lively countryside is only a fiction if there are neither jobs nor services in these areas.
Adaptive autonomy in combination with advanced human-robot interaction (HRI) could be part of the solution to this problem. The former assumes that the level of autonomy of a system, e.g., a farm vehicle, is subject to change based on its interactions with other autonomous systems or humans. Developing generic agent architectures to allow this to happen is a challenge. Advances in dependable hardware and software systems are also needed, since they allow autonomous systems to be safe and reliable. For an agricultural application, the overall system architecture is very complex, because it needs to be configured for both the vehicle navigation system (i.e., prescription maps) and for the farming task itself (i.e., seeding, crop establishment, plant care and selective harvesting). Thus, a huge quantity of information, site conditions (i.e., soil conditions) and data must be sensed and processed (involving sensors on board, actuators).
HRI is the other essential technology in this context, since these technologies do not always allow seamless user-friendly interaction that is also highly regarded by expert users. Lowering the cognitive load is important for minimising hazards. As mentioned above, adaptive autonomy agent architectures for robots can only create complex interactions through simple concepts such as ‘willingness to help’, and ‘willingness to ask for assistance’ [1]. The approach here assumes a high degree of interaction and complex relations (see Figure 1), instead of complex agent architectures. Mälardalen University, Sweden, is involved in two projects in which adaptive autonomy plays an important role: DPAC – Dependable Platforms for Autonomous Systems [L1], a national project, and ECSEL JU funded SWARMs – Smart and Networking Underwater Robots in Cooperation Meshes [L2]. The latter is coordinated by the second author of this paper.
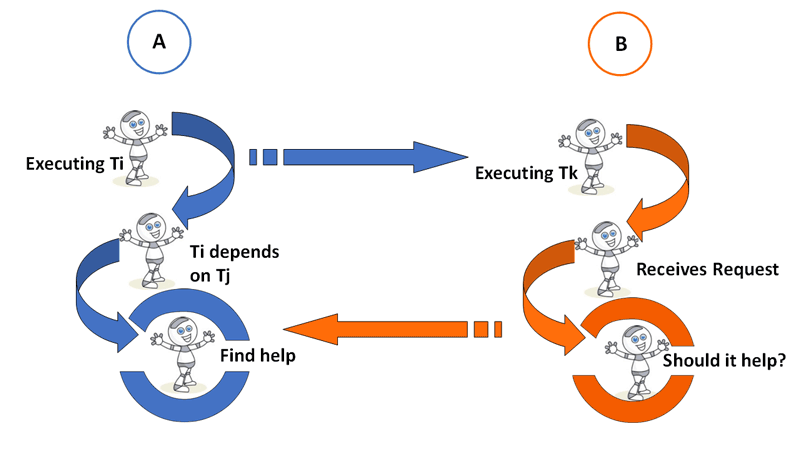
Figure 1: A high degree of interaction and complex relations.
When adaptive autonomy is extended to advanced robot-robot interaction and combined with HRI, we have a system for precision control of a group of autonomous systems by only a few operators. Therefore the role of a farmer changes and he becomes a specialised and innovative operator that can orchestrate a heterogeneous set of robots. Note that heterogeneity is an important assumption in this context. Different types, such as vehicles, robots, airborne solutions, etc. will be used for finding the right blend for a specific challenge. This will inevitably lead to mixed human-robot groups. For these groups to function seamlessly the autonomous systems need to be ethical [2].
Another research direction is underwater robots, which is associated with hazardous operations. In this application domain, in the SWARMs project, the first and second author have assumed that orchestration of the robots through high-level planning is needed. Despite the complexity of the missions, the operator is only monitoring the mission, including generation and execution of the plan. In both application domains, as well as other similar ones, the assumption is to minimise the intervention of the human operator. This is possible to achieve using autonomous systems. In any case, adaptive autonomy contributes to advanced robot-robot interaction schemes. Therefore, collaborative robots will get closer to humans working in teams – and even outperform them in certain tasks.
Links:
[L1] http://www.es.mdh.se/projects/414-DPAC
[L2] http://swarms.eu/
References:
[1] M. Frasheri et al., Towards Collaborative Adaptive Autonomous Agents, Conf. of ICAART, 2017.
[2] G. Dodig-Crnkovic, B. Çürüklü, Robots – Ethical by Design. Ethics and Information Technology, Springer, 2012.
Please contact:
Baran Cürüklü
Mälardalen University, Sweden
+46 (0)73-9607453

