









by Marcus Kaiser (IMK-Automotive)
The planning of assembly workplaces with direct human-robot collaboration (HRC) is a complex task owing to the variety of target criteria that must be considered. The lack of a digital simulation tool for the wholistic planning and safeguarding of HRC-scenarios, as well as a lack of adequate training and qualification concepts for companies, are currently inhibiting the implementation of HRC. We are developing a new way to digitally design collaborative assembly systems to help companies embrace HRC systems.
In the context of globalisation, manufacturing companies face new challenges. A growing diversity of variants of industrial components, shorter product life cycles and fluctuating demands require versatile production systems in order to secure the competitiveness of companies in high-wage countries in the future. Cost-effective assembly is an important lever for economic efficiency. Since investment-intensive and sometimes inflexible fully automated solutions are often limited in their ability to enhance productivity and efficiency, the topic of human-robot collaboration (H RC) is becoming increasingly important. The aim is to combine the strengths of the human (flexibility, intuition, creativity) with those of the robot (strength, endurance, speed, precision) to use resources efficiently and thus to increase productivity.
Previous implementations of HRC have failed to take full advantage of the potential for humans and robots to cooperate, owing partly to the complexity of the processes to be planned and partly to a lack of suitable methods and tools [1]. Simulation tools make it possible to visualise complex issues in advance and make them plausible, for example, in terms of feasibility, accessibility and space requirements without the use of costly prototypes. Various systems already exist in the market, which focus either on the simulation of manual workstations with digital human models or on the simulation of automated workplaces with partly manufacturer-specific robotic libraries. A few systems support the prototypical usage of a human model in simulation software for robotic systems for individual tasks. In order to meet the requirements for a wholistic HRC simulation for the various fields of activity of assembly, a combination of both simulation systems is necessary – but this is not supported by available software solutions [2].
The goal of the collaborative research project KoMPI [L1] is to develop a new method for the integrated planning and implementation of collaborative workplace systems in assembly with different product scenarios. This essentially comprises three components shown in Figure 1. The main part is the development of a wholistic, digital planning tool. On the basis of a potential analysis of the work system carried out in advance, the automation, technical and economic suitability, ergonomics and safety can be simulated and evaluated. The second component comprises developing a concept for the participation and qualification of the involved employees in order to integrate them early in the planning process and thus to ensure their acceptance. The third component is the implementation of HRC application scenarios for the respective partners to use and the associated validation of the planning tool.
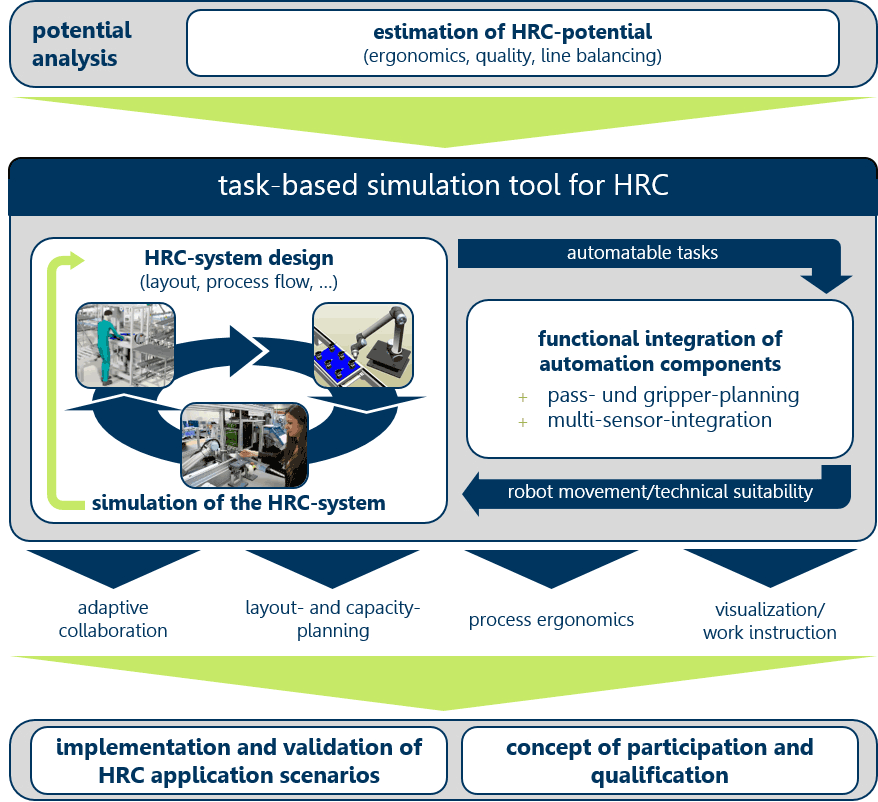
Figure 1: Three stage implementation procedure of the proposed HRC system.
The main task of the development of the performance-based, digital tool is the integration of human model and robot simulation systems. The human behaviour simulation is done using the software Editor of Manual Work Activities (called “ema”) [L2] developed by imk automotive GmbH. It is a wholistic planning method based on a digital human model, which autonomously executes work instructions based on MTM-UAS. An interface between ema and the open source software framework Robot Operating System (ROS) will enable ema to simulate robots, sensors and their environment with the help of a wide range of drivers [3].
The software called ema, enhanced with appropriate functionalities, will form the basis of a system that will help with the wholistic planning of HRC workplaces. In addition to the functions for the human model, parametrisable tasks for automation components are developed, which allow a flexible allocation of work tasks between human and robot. In addition to the libraries for human models, robots, sensors and environment objects, a grasp library is also implemented in order to make a statement about the feasibility of the automation tasks. The interface to ROS also enables collision-free path planning, taking into account human movements and the entire environment [4]. The design and safety guidelines of ISO TS 15066 are also taken into account. Including all HRC operating modes (safety-rated monitored stop, hand guiding, speed and separation monitoring, power and force limiting), a sensor library and the logical link to objects, taking the corresponding safety distances into account, allowing the creation of a safety concept. For example, the output of collision and contact forces as well as the maximum valid speed limits of the robot support the planner in the risk assessment. In order to meet the requirements of the planning task, decisive information on the economic, ergonomic and safe operation of a HRC system can be generated before implementation.
The research and development project “KoMPI” is funded by the German Federal Ministry of Education and Research (BMBF) within the Framework Concept “Research for Tomorrow’s Product ion” (fund number 02P15A060).
Links:
[L1] www.kompi.org
[L2] www.imk-ema.com
References:
[1] W. Bauer et al.: “Leichtbauroboter in der manuellen Montage- einfach einfach anfangen”, Stuttgart: Fraunhofer IAO.
[2] P. Glogowski et al.: “Task-based Simulation Tool for Human-Robot Collaboration within Assembly Systems”, in Tagungsband des . Kongresses Montage Handhabung Industrieroboter, Springer Vieweg, 2017.
[3] M. Quigley, B. Gerkey, W. Smart: “Programming Robots with ROS”, O’Reilly Media.
[4] K. Lemmerz et al: “Functional Integration of a Robotics Software Framework into a Human Simulation System”, in ISR 2018.
Please contact:
Alfred Hypki
Ruhr-Universität Bochum, Germany
+49 234 32 26304

