









by Dario Albani and Vito Trianni (ISTC-CNR)
Drawing inspiration from the behaviour of honeybees, a buzzing swarm of small unmanned aerial vehicles (UAVs) will fly over hectares of cultivated fields seeking weeds.
Want the grass to be greener on your side of the fence? Robots are the new frontier for agriculture and will soon be making this a reality. The Swarm Robotics for Agricultural Applications (SAGA) project is one of the frontrunners in deploying robot swarms in the field: drawing inspiration from the behaviour of ants and bees [1], it uses a swarm of small unmanned aerial vehicles (UAVs) to process information onboard and to constantly monitor the presence of weeds and the status of the crops. More efficient monitoring can help with eliminating weeds, whilst reducing costs and improving crops.
SAGA tackles the problem of sugar beet fields infested by volunteer potatoes—a common benchmark in agricultural robotics. Volunteer potatoes originate from tubers that remain in the soil after harvesting. During the next season, when sugar beets are grown in the same field, volunteer potatoes are a major threat, as they spread diseases and facilitate harmful soil nematodes. Regulations require farmers to control this weed — a costly operation that in the Netherlands has an estimated cost that goes up to 300€ per hectare per growing season. This cost could be drastically reduced by an efficient and automated weeding system.
Drones represent a valid solution and are expected to have a big impact on precision agriculture. A single UAV traversing and inspecting the field could provide the farmer with huge streams of data. A swarm not only guarantees the same output in a fraction of the time but, thanks to distributed algorithms, drastically increases accuracy and precision.
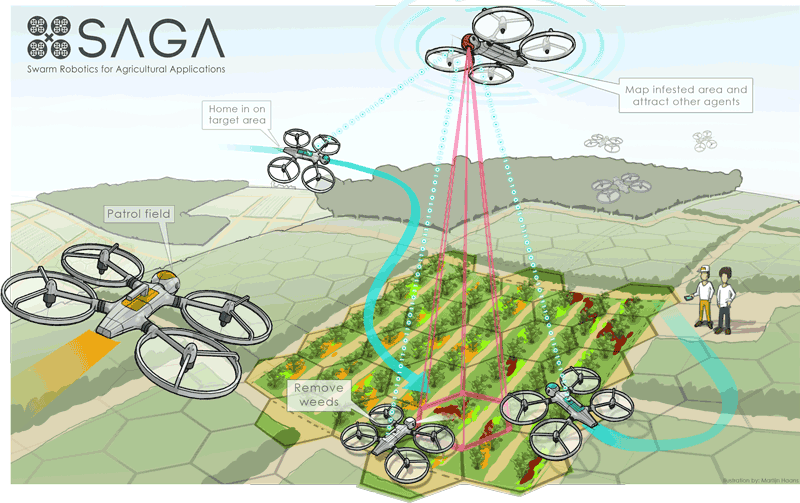
Figure 1:The Swarm Robotics for Agricultural Applications (SAGA) project is deploying robot swarms for weed monitoring and mapping.
Controlling a bevy of robots is not trivial and requires specific techniques to ensure robustness to faults and scalability to large groups. To this end, UAVs employ an algorithm relying on random walks, an exploration technique based on stochastic movements [2]. First, the field is discretised into a 2D grid with fixed size cells. For every decision step, probabilities are assigned to the cells in a way to optimally deal with individual effort and social influence. To avoid costly manoeuvres, both in terms of energy and time, bigger probabilities are assigned to cells that are in the same direction of motion. To obviate long relocations, only a subset of cells in the vicinity is taken into consideration. Moreover, drones collaborate and send information about their position and already visited locations. This information is translated into attracting and repulsive forces: attraction toward points of interest and repulsion from each other. These mechanisms can be controlled with a few parameters that allow the system to be tuned and adapted to specific working conditions, achieving an efficient, reliable and fast mapping of the field [2].
Furthermore, the swarm is designed to exploit all three dimensions. Many applications require high-resolution data only in certain areas while other parts can receive lower attention. Hence, UAVs can adjust the altitude to increase the resolution only where needed, making non-uniform strategies efficient both in time and energy expenditure [3]. A close inspection guarantees higher image resolution and greater accuracy, but at the cost of higher inspection time due to the limited footprint of the camera. To obtain the best trade-off between accuracy and speed, the SAGA swarm implements a decentralised deployment strategy inspired by honeybee behaviour [1], that dynamically assigns UAVs to different areas to be monitored, and suitably re-assigns them to other areas when needed. In this way, UAVs only inspect some areas at low altitude, while mildly monitoring other cells. Thanks to this self-organising strategy, the swarm can partition the monitoring task in an optimal way and autonomously allocate the required resources only where and when needed.
The successful demonstration of the SAGA project raises the bar for swarm robotics research. The natural step forward is the extension of the agricultural swarms concept toward heterogeneous systems made of ground and flying robots, tackling all sort of tasks within the farm, from weed removal to pest control, from optimal usage of fertilisers to harvesting.
References:
[1] A. Reina, J. A. R. Marshall, V.Trianni, T.Bose, “Model of the best-of-N nest-site selection process in honeybees” Phys. Rev. E, vol.95, no.5, 2017, pp. 52411–52415.
[2] D. Albani, D. Nardi, V. Trianni, “Field Coverage and Weed Mapping by UAV Swarms,” in IEEE International Conference on Intelligent Robots and Systems, 2017, pp. 4319–4325.
[3] S. A. Sadat, J. Wawerla, R. T. Vaughan, “Recursive non-uniform coverage of unknown terrains for UAVs,” in IEEE International Conference on Intelligent Robots and Systems, 2014, pp. 1742–1747.
Links:
http://laral.istc.cnr.it/saga/
Please contact:
Dario Albani, (+39) 06 44595 341,
Vito Trianni, (+39) 06 44595 277,

