









by Markus Hofer and Thomas Zemen (AIT)
The properties of wireless vehicular communication channels do not remain constant during a vehicle’s trip. Both the transmitter and the receiver are moving, which generates not only time and frequency (doubly) selective channels but also channel statistics that are non-stationary, i.e., they change over time. To function properly, new wireless vehicular communication systems for connected autonomous vehicles require validation and verification in vehicular environments. To avoid time intensive, costly and difficult to repeat real-world measurements on the road, real-time channel emulators that emulate the wireless vehicular channel as accurately as possible are needed. We present a real-time channel emulator based on a software defined radio platform that is able to emulate real-world propagation scenarios.
Connected autonomous vehicles exchange information using wireless vehicle-to-everything (V2X) communication to improve road safety and travelling convenience, reducing traffic congestion, minimising fuel consumption and enhancing the overall driving experience. In fully automated driving systems real-time control algorithms integrated into the automated vehicle’s control unit will use this information to adapt the driving route and velocity to the current situation.
The performance of wireless communication systems is fundamentally determined by wireless communication channel properties. Due to moving transmitter, receiver and scatterer objects, wireless vehicular communication channels exhibit multipath propagation and non-stationary channel statistics, i.e., channel statistics that change over time. A schematic representation is shown in Figure 1.
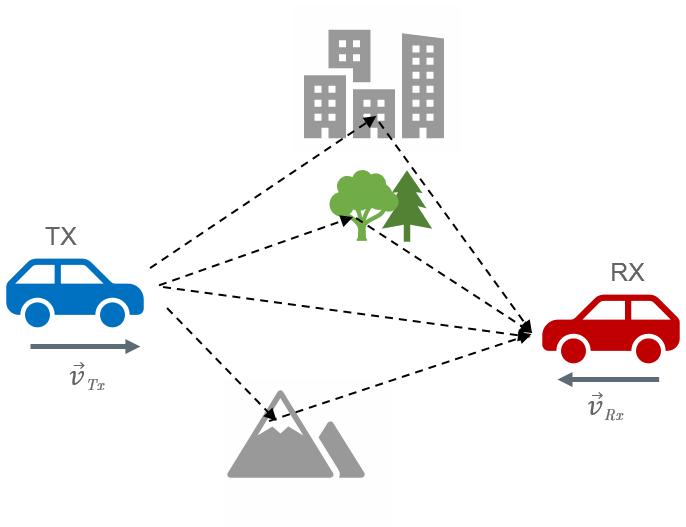
Figure 1: Influence of environment on wireless communication.
For the development of reliable low-latency communication links, the wireless communication system together with the real-time control algorithm have to be tested in a repeatable fashion in vehicular environments.
Tests in the laboratory have the benefit of easy repeatability, while tests on the road are typically costly, labour intensive and difficult to repeat. To conduct laboratory tests, the wireless communication channel has to be mimicked, which is done by wireless channel emulators. These channel emulators need to reflect the real word propagation channels as accurately as possible. Specifically, the testing of real-time control algorithms requires updating the position and speed of the transmitter (TX) and receiver (RX) according to the laws of kinematics, and correspondingly, the wireless propagation characteristics in real-time with continuous variations in delay and Doppler shift. With this approach the real-time wireless data communication between the controller and the sensors as well as between the controller and the actuators will reflect the properties of a realistic environment. Current channel emulators, however, use very simple channel models such as a basic path-loss or delay and stationary statistics.
We present real-time channel emulation for non-stationary propagation scenarios based on a geometry-based stochastic channel model (GSCM) that was developed within the Security and Communication Technologies group of the Centre for Digital Safety and Security of the Austrian Institute of Technology (AIT) in Vienna. A schematic representation is shown in Figure 2. The GSCM utilises the environment description, such as the positions of buildings, road signs, traffic lights, etc. as well as the coordinates and velocities of moving objects to calculate all possible propagation paths including their attenuations, Doppler shifts and path delays. Variations of the model, like the number of moving cars on the street or the diffuse scattering caused by vegetation or wall clutter, for instance, are taken care of by statistical models.
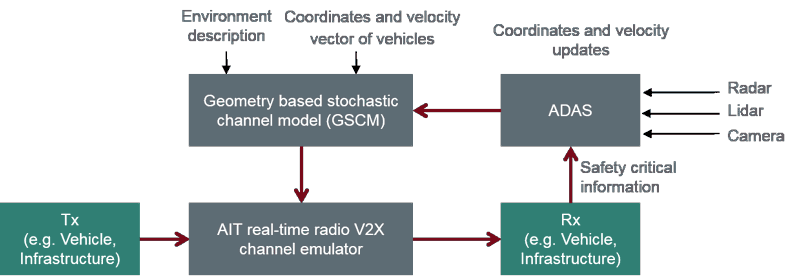
Figure 2: Real-Time Channel Emulation.
The high complexity of the GSCM prohibits a direct real-time implementation. Hence, we use a low-complexity subspace projection model which allows for an emulation complexity that is independent of the number of propagation paths [1, 2]. With this technique it is possible to emulate real world propagation environments, like road crossings, highways, merging lanes, etc. with a large number of paths in real time. Due to the real-time capability of our emulator we are able to test communication systems in connection with advanced driver assistance systems (ADAS) in a virtual environment, see Figure 2. The ADAS uses information from Radar, Lidar and camera sensors as well as safety critical information that is obtained from other vehicles, to update the trajectories (coordinates and velocities) of the vehicles. These changes are directly reflected in the channel propagation properties, i.e., in the change of path attenuation, Doppler shift and delay which are emulated by our real-time channel emulator. The utilisation of modern software defined radio equipment allows for flexible frequency bands e.g., 3.5 GHz or 5.9 GHz.
To test the proper functionality of the channel emulator we measured the emulated channel with a special measurement device in collaboration with the Department of Electrical and Information Technology of University of Lund. In Figure 3 we show the comparison of the Doppler spectral density of a road intersection for (a) a real-world measurement, (b) numerical co-simulation and (c) measurement of our real-time channel emulator [3]. We clearly observe that our emulation method captures the non-stationary properties of the communication channel very well. This allows for a repeatable test of communication devices in the laboratory.
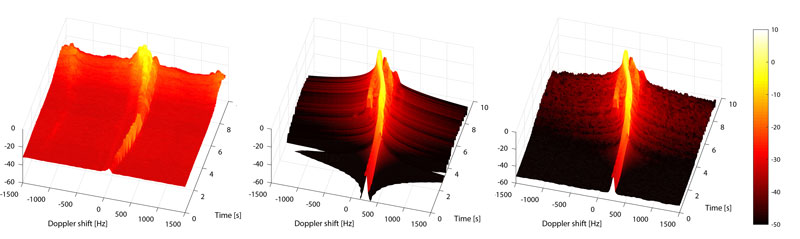
Figure 3: Comparison of the time-varying Doppler spectral density for a road intersection.Left: (a) Measured propagation channel, centre: (b) Numerical GSCM evaluation, right: (c) Measured channel emulator.
The developed methods are not limited to vehicular scenarios like road intersections, urban scenarios or highways. They can also be applied to mimic the wireless communication channel in industrial or railroad environments, for example, where robots have to communicate with each other.
References:
[1] F. Kaltenberger, T. Zemen, and C. W. Ueberhuber: “Low-complexity geometry-based MIMO channel simulation,” EURASIP Journal on Advances in Signal Processing, 2007.
[2] M. Hofer, et al.: “Real-time geometry-based wireless channel emulation” in IEEE Transactions on Vehicular Technology, vol. 68, no. 2, pp. 1631 - 1645, February 2019.
[3] M. Hofer, et al.: “Validation of a real-time geometry-based stochastic channel model for vehicular scenarios” in IEEE 87th Vehic Technol. Conf. (VTC-Spring), Porto, Portugal, June 2018.
Please contact:
Markus Hofer
Austrian Institute of Technology (AIT)
+43 664 8251088
Thomas Zemen
Austrian Institute of Technology (AIT)
+43 664 88390738

