







by Eleni Troulaki and Michail Maniadakis (FORTH-ICS)
The RECLAIM project, funded by the EU’s Horizon Europe programme, seeks to develop innovative solutions in the waste management industry, targeting regions where access to material recovery facilities is less sustainable. By integrating cutting-edge AI, data, and robotic technologies, the project introduces the first portable and robotic Material Recovery Facility (prMRF) enabling the decentralised treatment of recyclable waste.
The recovery of recyclable materials is a key element of the Circular Economy and the European Green Deal. The EU is continually increasing its targets for the recycling of municipal waste, in order to reintegrate valuable waste materials back into the economy, safeguard the environment, and protect human health. By 2025, 55% of municipal waste and 65% of packaging waste must be re-used or recycled [1]. Recent advances in technology and robotic sorting systems make the achievement of these goals more attainable. Robotic waste sorters have gained popularity and are now being adopted by several Material Recovery Facilities (MRFs) that are typically located near urban areas, to carry out municipal waste treatment. Despite the high productivity of industrial robotic waste sorters, transportation of waste to these large plants is costly and makes material recovery difficult due to the compression of waste during transport.
To minimise transportation and treatment costs, RECLAIM develops the first portable robotic Material Recovery Facility (prMRF) that enables local-scale material recovery with industrial-level efficiency. The prMRF developed in RECLAIM is hosted in an ordinary container (Figure 1) that is fully equipped with recycling machinery, deep learning-powered computer vision and hyperspectral imaging for advanced and accurate waste categorisation. Additionally, a team of highly efficient Robotic Recycling Workers (RoReWos) is being used, which is equipped with a range of grippers, specialised for different material types. The idea is to use multiple cost-effective robots, each one handling a different sorting task, rather than relying on a single, high-cost robot to perform all tasks. This approach enhances the effectiveness of the overall system by allowing each robot to specialise in handling and sorting of certain categories of recyclables.

Figure 1: Exterior view of the RECLAIM’s portable robotic Material Recovery Facility (prMRF).
The solution developed in RECLAIM is highly appropriate to address the need for effective material recovery in various scenarios, such as small islands, seasonally operated touristic areas with limited access to waste collection and recycling facilities, and large event venues (like exhibition centres, stadiums and festivals) where tons of waste are produced in a short timeframe. RECLAIM demonstrates how innovative technology can be used to bridge the gap between waste production and resource recovery, transforming potential waste into valuable resources. The prMRF is not just a technological advancement; it is crucial for developing a global, leakage-free circular economy model that will be highly beneficial to the environment, and the society. By enabling on-site recycling in areas previously lacking material recovery services, RECLAIM’s prMRF addresses immediate waste management challenges and supports the broader goal of a sustainable, circular economy.
Moreover, the RECLAIM adopts a “Citizen Science” approach, encouraging participation from citizens of all ages, genders, and educational backgrounds in generating data for the advancement of waste management technologies. In particular, the Institute of Digital Games at the University of Malta (UoM), has designed and developed a novel Recycling Data Game (RDG), which enables citizens to participate in project activities by providing annotations to be used in deep learning for the re-training of the computer vision module. As a result, the RDG serves two main purposes: a) increasing awareness and social sensitivity about recycling and b) supporting the training and optimisation of AI algorithms to accomplish better results in identification, segmentation and categorisation of materials, which is crucial for the operation of the prMRF.
The environmental game mentioned above includes seven different challenges (mini-games): “Paint”, “Detect”, “Count”, “Outline”, “Locate”, “Choose” and “Categorise”. Through these seven challenges the players of the game are being involved in data-annotation and reviewing activities on real-world images captured by cameras installed in the project’s prMRF (Figure 2). The data collected by players/users are then used to train deep neural networks (DNNs) that identify and categorise recyclable materials, significantly enhancing the operation of the portable robotic material recovery unit.
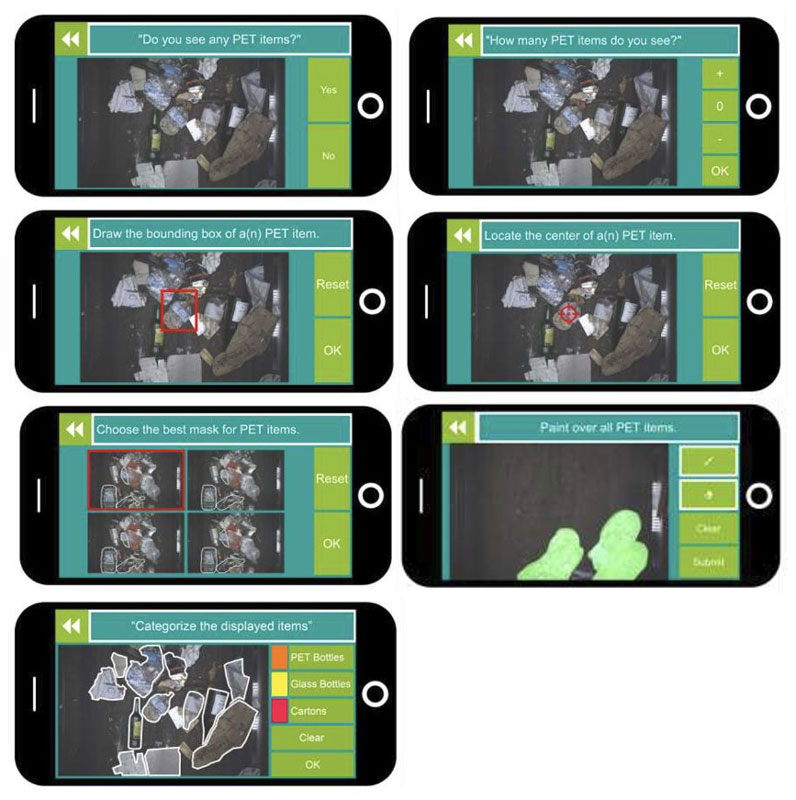
Figure 2: The seven mini-games that were developed by the University of Malta for the RECLAIM’s Recycling Data Game (RDG).
RECLAIM is a three-year project (September 1st, 2022 – August 31st, 2025) coordinated by the Foundation for Research & Technology – Hellas (FORTH). The rest of the consortium consists of nine more partners: KU Leuven, ROBENSO – Robotic Environmental Solutions, HRRC – Hellenic Recovery Recycling Corporation, IRIS, AIMPLAS – Plastics Technology Centre, AXIA Innovation, UoM – L-Universita ta’ Malta, ISWA – International Solid Waste Association and ION Ionian Islands Local Authorities.
Links:
[L1] https://reclaim-box.eu/
References:
[1] N. Tsagarakis, M. Maniadakis, “On the generation and assessment of synthetic waste images,” in Proc. IEEE Conf. on Artificial Intelligence – CAI 2024, 2024.
[2] N. Kounalakis, F. Raptopoulos, M. Maniadakis, “Robotic Recycling Workers: a low-cost alternative for autonomous material recovery,” in Proc. 33rd Int. Conf. on Flexible Automation and Intelligent Manufacturing – FAIM 2024, 2024.
Please contact:
Michail Maniadakis, FORTH – Foundation for Research & Technology, Greece