









by Michele Martelli (Università degli Studi di Genova), Pietro Cassarà (ISTI-CNR), Antonio Virdis and Nicola Tonellotto (UNIPI)
A distributed computing platform can provide automatic control for maritime services, with likely economic and social benefits. In this context, the nodes involved in the computing tasks are autonomous complex cyber-physical systems, i.e., ships. The platform allows node computing cooperation through a high-level abstraction of the underlying sensor system. The computing tasks are related to the predictive analysis, employing artificial intelligence (AI) techniques based on the federated-learning paradigm.
The best way to increase the efficiency and reliability of maritime services is to learn how to react automatically to what happens in the surrounding environment. Consequently, the platform must be able to tune the computation tasks parameters accordingly to the state in which the system will be. A novel approach to automation is to use a distributed platform that implements a digital characterisation of cyber-physical systems – in this case, unmanned surface vessels (USVs) – to obtain an Internet of Autonomous Ships (Figure 1). In particular, the system should be able to represent a significant use case in which ICT supports systems and machinery maintenance through sensors and actuators, providing a digital representation of the ship. The ship can be considered a highly complex system composed of heterogeneous and interconnected hardware and software [1]. Managing such a complex system relies on a dense network of thousands of heterogeneous sensors [2] located both onboard and in remote control systems, coupled with a local computing infrastructure.
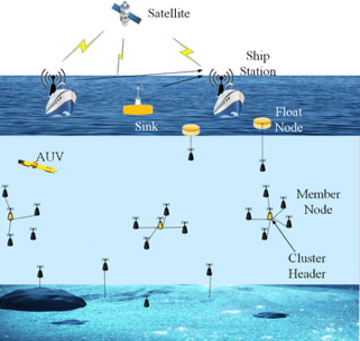
Figure 1: Application scenario.
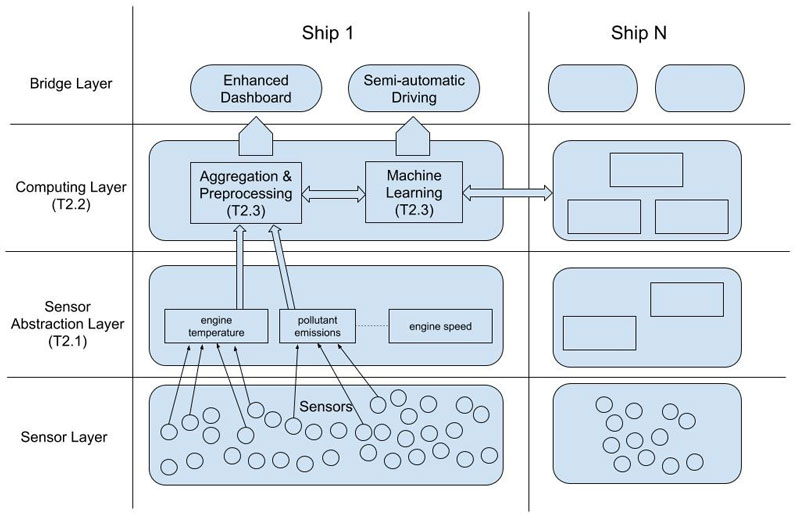
Figure 2: Evaluation process layers.
The local infrastructure can be considered a node of the Internet of Ships (IoS) and its role is to abstract the complexity of the underlying sensor system, resulting in a high-level representation of the management systems, the bridge, and the federated elements (Figure 2). Having a local infrastructure also has indirect benefits, including (i) reduced latency and cost of transmission because the synthesis of useful information, rather than raw data, is transmitted (thus avoiding “data deluge”); and (ii) confidentiality of the data is guaranteed.
Data will be shared within the IoS network to achieve a collaborative aggregation of information and to enable a predictive analysis [3] (such as ship trajectory, drop of the machinery performances, etc.) using artificial intelligence (AI) and machine learning techniques and algorithms under the “federated learning” paradigm. This paradigm relies on a distributed computing system that allows AI mechanisms to be implemented over an extensive network of nodes made up of the autonomous vehicles of a fleet. A single autonomous vehicle (a ship) obtains the current AI model from a remote computing centre (data centre) and subsequently updates its onboard model. The computing centre then summarises the changes made to the AI model and redistributes them to the ships in the network. The data centre’s task is, therefore, to merge and standardise all the updates it receives from the ships (network nodes) to improve the global shared AI model, which will thus be updated and made available to all the network nodes. This approach allows machine learning algorithms to be decoupled from data collection and storage, and it requires an appropriate redesign of applications and algorithms. In other words, all training data remains on board the ships, and individual updates are not distributed to other ships or stored in the data centre, ensuring maximum confidentiality of the information (Figure 2). This is crucial when ships from different companies are operating in the same region.
To test the reliability and the feasibility of this complex system, we plan to simulate different operation scenarios for maritime applications. We will test the procedures and algorithms for an unmanned vessel-based smart automation scenario using a self-propelled physical model in scale (which is already in use at the University of Genoa), and many emulated ships through “digital twins” tools (Figure 3). Both real and virtual ships navigate in the same environment and communicate with each other via a data centre, which also manages the AI algorithm. This testbed represents a realistic representation of a crowed navigation area without the needs of multiple vessels, and the system could be tested and debugged with the high safety level.
Our platform offers an innovative way of providing automatic control services and data traffic analysis for the maritime sector, potentially having economic and social benefits for the maritime community. For example, our platform can be useful to analyse operational data to develop a tool capable of guaranteeing a high level of safety also from ashore, moving many services to the ground. In this way, the number o activities performed by the workers in dangerous and stressful conditions can be decreased.
References:
[1] M. Martelli, M. Figari: “Real-Time model based design for a CODLAG propulsion control strategies”, Journal of Ocean Engineering, vol. 141, pp. 265-276, 2017.
[2] M. Bacco, et al.: “IoT Applications and Services in Space Information Networks”, IEEE Wireless Communication Magazine, vol. 26, issue 2, pp. 31-37, 2019.
[3] P. Cassarà et al.: “A Hybrid Cross-Entropy Cognitive-based Algorithm for Resource Allocation in Cloud Environments”; IEEE Int. Conf. SASO, London, pp-1-9, 2014.
Please contact:
Michele Martelli, Università degli Studi di Genova, Italy
Pietro Cassarà, ISTI-CNR, Italy

