









by Carl Binding, Olle Sundström,Dieter Gantenbein and Bernhard Jansen
The sudden peak of oil prices in 2008 together with the depletion of oil reserves, and the ecological impact of today’s combustion engines have sparked renewed interest in fully electrical vehicles (EV) and plug-in hybrid EVs (PHEV). Based on typical driving patterns, it is believed that EVs could substantially alter the energy mix used for individual transportation, current limitations of battery technology not withstanding. In addition, in electrical power grids with a high percentage of fluctuating, renewable, energy sources (wind, solar) a larger fleet of EVs can absorb peaks of power production, and attenuate power troughs by acting as a distributed energy resource (DER), feeding power from its accumulator into the grid. In the context of the Danish EDISON project, we are investigating the potential impact of an EV fleet on electrical distribution grids and how to optimally integrate these resources into the power grid.
In the recent past, several motor vehicle vendors have announced PHEVs or EVs for the US, the Japanese, and the European markets. The expected electrical range of these vehicles varies between 50 to 100 km, which is considered enough to cover a large percentage of daily driving patterns, in particular commuting to and from work.
The basic concept is to integrate an electrical accumulator into the vehicle which is recharged during stop-overs, preferably during periods in which electrical energy from environmentally friendly sources is abundant and exceeds the non-EV load in a power grid. Conversely, one can also imagine EVs feeding back excessive energy, when not needed by the car’s operator, into the grid during times of peak demand when insufficient power is supplied by wind or solar. Hence, the vehicle’s accumulator acts as a buffer for electrical energy. Since electrical power grids require continuous balancing of generated and consumed power, this energy buffering is of technical and economical interest as a supply of balancing power to the power grid. In particular, in grids with intermittent power supplies and limited balancing power supplies (hydro, gas turbines) additional balancing power capabilities are appealing.
The goals of the Danish EDISON project are to build a pilot system to aggregate a fleet of EVs and have this aggregator, or virtual power plant (EV-VPP), act as an entity capable of delivering and absorbing balancing power [2]. Clearly, given the power volumes of typical EVs charging (which varies from 3 kW upwards) versus the power delivered by a typical wind-turbine (1.5-3 MW), such aggregation is needed in order to achieve some balancing power impact.
Figure 1 illustrates the overall concept. CO2 neutral wind-energy is fed into the EV fleet and can be consumed by the traditional domestic and industrial loads when power supply from intermittent, renewable, sources is reduced.
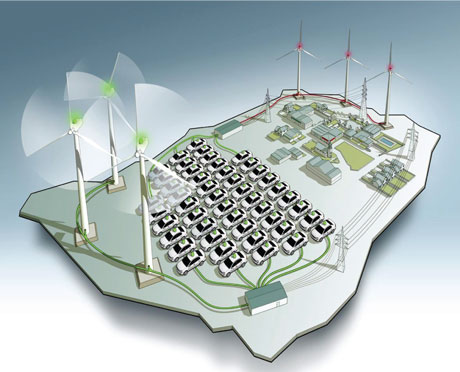
Figure 1: The EDISON Concept (Picture by courtesy of muff-illustration.ch).
There are several challenges which need to be addressed by such an undertaking:
- Resource management: The EVs – as managed resources - need to maintain appropriate levels of state-of-energy in their accumulators to satisfy their user’s requirements. Sufficient electrical power must be available when the vehicles are parked in order to recharge the batteries. When feeding power from the EV into the grid, enough energy for the next trip must remain stored in the accumulator. Ideally these requirements should be economically beneficial for the end user, ie he or she will want to charge the batteries in times of cheap power and possibly re-sell such power at a higher price during power troughs within the grid. A grid utility might have different objectives regarding pricing – a global cost optimization for provision of energy to the EV fleet is its likely objective.
- Grid integration: Smart charging or discharging must be aligned with the electrical grid’s power generation ability and non-EV, conventional, loads. Based on forecasts of available renewable power, EVs can optimize their charging behavior under the assumption that energy costs are low in times of abundant renewable power and vice versa. The energy requirements for each EV can either be estimated or obtained from the EV users in order to perform planning for individual EVs in relation to overall power supply and non-EV load in the grid.
- Communications: Reliable, secure, timely and responsive communications are needed to exchange information between distributed energy producers, mobile energy consumers, and the EV-VPP. The grid’s status, as well as its static parameters, is required for a comprehensive optimization and this information needs to be relayed to the VPP.
- Billing and customer relationship management: Last but certainly not least, end-users will have to be billed for power consumed, and power fed from the EV’s battery into the grid must be accounted for. This is based on metering information which can be transmitted from the EV’s charging spot into the grid and utilities IT infrastructure. End-users will need to be provided with the ability to register, to deregister, and to manage their profiles with the EV-VPP. To enable larger reach of EVs, roaming between VPPs also needs to be provided; similar to cellular telephone systems this requires appropriate and interconnected back-end infrastructure.Our approach to solving the above integration problem is centered on two key aspects. First we postulate the architecture of an EV-VPP. As shown in Figure 2, the data flows into the VPP, originating from various entities in the power grid: the loads (ie, the EVs), the transport and distribution grids, and the power generation. The VPP’s core task is to derive the optimal charging plans for all vehicles under its control and disseminate these to the EVs.
The second key postulate is that we perform a centralized, global, optimization of the charging behavior. Using information gathered from energy consumers and generators as well as grid operators, we set up a linear programming optimization which computes a charging plan for each EV which minimizes the global energy costs for total EV recharging. We also address potential distribution grid constraints by including power flow bottlenecks in the planning of the charging. The computed charging plan is eventually pushed back to the EVs and its execution is then controlled during the daily grid operations; possible overriding control messages are generated in case of non-anticipated deviations from the plans.
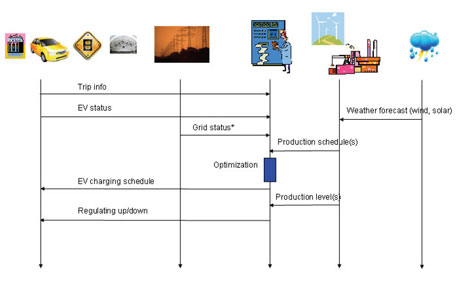 Figure 2: EV-VPP Architecture - Message Flow.
Figure 2: EV-VPP Architecture - Message Flow.
We are currently simulating the above optimizations using a synthesized grid patterned after the Bornholm (DK) power grid [1]. We include approximately 11,000 low-voltage access points and simulate the motion of EVs over that grid. For each EV, we maintain historical trip data which we use in order to estimate future energy needs. The generation estimates are based on wind-data and conventional generator resources. We have been able to achieve reasonable performance using a fleet of over 1,000 vehicles simulated on conventional lap-top computers.
Our current work focuses on integrating more available real-world trip and grid data into our simulation. We are also investigating the convergence and complexity issues associated with the impact of the grid constraints into the planning for EV charging. Based on our work so far, we believe that our approach delivers optimal grid and resource utilization. Our investigations continue.
Links:
[1] Wind power system of the Danish island of Bornholm: Model set-up and determination of operation regimes http://www.elektro.dtu.dk/English/about_us/staff/staff_lists/staff.aspx?lg=showcommon&id=240821
[2] The EDISON Project http://www.edison-net.dk/
[3] IBM ILOG CPLEX V12.1: User’s Manual for CPLEX
ftp://public.dhe.ibm.com/software/websphere/ilog/docs/optimization/cplex/ps_usrmancplex.pdf
Please contact:
Carl Binding
IBM Zurich Research Laboratory, Switzerland
E-mail:
