









by Paul Panek, Christian Beck, Georg Edelmayer, Peter Mayer and Wolfgang L. Zagler
Even small robots have great potential to support the elderly. We have created a prototype of a LED projector module that enables a small humanoid robot to project text, graphics and video to a surface next to the user.
The research project KSERA (“Knowledgeable SErvice Robots for Aging”) develops a social assistive robot that supports older persons, especially those with Chronic Obstructive Pulmonary Disease (COPD), in their daily activities and care needs. Independence and overall quality of life can be enhanced when individuals are able to engage in self-management of their disease.
The small NAO humanoid, from French company Aldebaran, is used for the robotic platform. It serves as an interface between the user and the system, which is embedded in a smart home environment enabling ubiquitous monitoring of the user’s activities and health status and of the environmental conditions.
As the humanoid robot we used is comparatively small (57 cm tall) it is not able to carry HCI devices such as a tablet PC and to present it to a sitting or standing user. To overcome this restriction an innovative LED projector module mounted on the robot’s back was developed in the KSERA project.
The projector unit on the robot’s back (Figure 1) projects text, graphics and video information towards a wall next to the user. With video phone communication a camera in the robot’s head is used to transmit the user’s video stream towards the communication partner (Figure 2). This is intended for social communication (friends, family members), video communication to medical services and in the case of emergency (eg a fall).

Figure 1: Prototype of LED projector unit (left) mounted on the humanoid NAO robot (right)
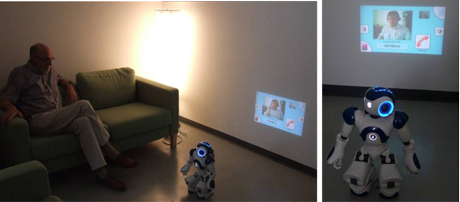
Figure 2: NAO robot with a LED projector unit on its back during video communication between KSERA user (sitting on a couch) and a call centre operator.
The main innovation is considered to be the mobility of the solution, as the assistive robot with its projector equipment can come to the user anywhere in the apartment. The text and graphics to be projected are provided by the KSERA intelligent server; similarly, the timing of the beginning and end of projections is controlled by the KSERA state machine. The projector component is responsible for the visualization of the information to be shown to the user. For initial laboratory evaluation, a workshop with a small group of experts from the care domain was organized following a qualitative approach. The experts agreed that the quality of audio and video was good and would be adequate for video communication in the given context.
Added value was found to be in the persistence of projected text and graphic for somewhat more complex messages (eg daily agenda, air quality information) and in the video phone capability. The latter provides more comprehensive information regarding the actual state and emotional situation of the user than can be achieved with an audio only connection. The video connection is particularly useful in emergency scenarios, when the operator of the emergency centre needs to quickly assess the severity of the situation.
Discussion and conclusions
A mobile video solution is much appreciated by experts and potential end users. Despite the promising results, some limitations of the current prototype system exist, namely: The low brightness of the LED projector used (30 ANSI lumen). By using blinds on the windows and artificial light in the test room, a realistic environment could be set up but it was at the lower limit of ambient brightness recommended for living areas. It is expected that brighter projectors will be available in the near future overcoming this drawback.
Further work will involve validating the integrated KSERA prototype with older users in Austria and Israel in near to real life environments.
Acknowledgement
This work was partly funded by EC in the FP7 KSERA project.
Links:
http://www.ksera-project.eu
http://www.aldebaran-robotics.com/
http://www.aat.tuwien.ac.at/ksera/
Please contact:
Paul Panek, Vienna University of Technology, Austria
Tel: +43 1 58801 187713
E-mail:

