








by György Kovács and Imre Paniti
In the summer of 2011 a new robot laboratory began operation in SZTAKI, in the Computer Integrated Manufacturing Research Laboratory, with the aim of supporting international networking and raising the public and professional profile of research and development in this field.
SZTAKI was one of the first institutes in Hungary to initiate robotic and intelligent manufacturing research around 40 years ago. The institute achieved outstanding results in fields related to robotics and manufacturing automation, including: pattern recognition, sensor technology, controller developments and virtual and extended manufacturing. The establishment of the new robotic laboratory will allow us to join high-level EU R&D efforts in joint projects, and to extend our scientific- and application activities.
The new laboratory has two robots (one small and one large) and a small 2.5D milling machine. The small robot has a circular work envelope of 445 mm maximum horizontal reach and a maximum payload of 1.2 kg, while the milling machine has a working space of 400x250x50 mm (see Figure 1).
The industrial robot (see Figure 2) has the following specifications: Axes: 6, Payload: 130 kg, H-Reach: 2488 mm, Repeatability: ±0.5 mm, Controller: FANUC R-J3. This is a rather big and powerful tool that showcases several main features that are requested from “real industrial robots”.

Figure 1: Set-up with small robot and milling machine

Figure 2: New set-up with the FANUC S-430iF robot
To get the laboratory up and running, we had to design and implement several tools, including:
- mechanical stands to install the robot and the controller, enhancement of the controller with I/O modules, installation of industrial camera, mirror, etc. to prevent ceiling collision.
- appropriate frames and tools for the robot to run incremental sheet forming (ISF) experiments [1] (see Figure 3).
- an environment (lights-camera box and software to recognize the starting situation of the magic cube, and an appropriate gripper). The software to control turning sequences and robot movements was developed and installed to solve Rubik’s Magic Cube puzzle (see Figure 4).
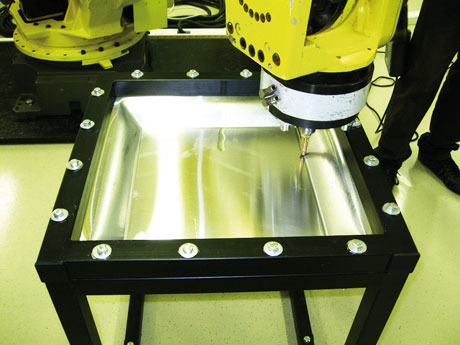
Figure 3: ISF experiment with the FANUC S-430iF robot
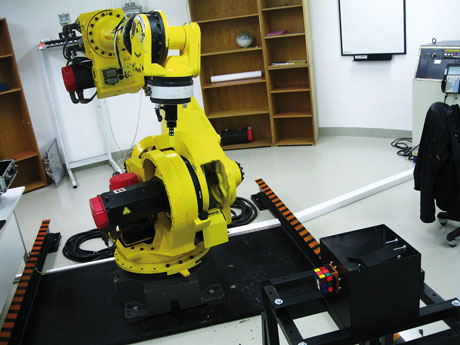
Figure 4: FANUC S-430iF robot, lights-camera box and Rubik’s Cube
Recently, three experiments have been running on the laboratory’s three tools: Two deal with ISF, while the third is a kind of a “Hungaricum” to solve the magic (Rubik’s) cube.
Incremental sheet forming is a relatively new technology in sheet forming and there are various research questions still to address, for instance questions relating to thickness, stress, force and torque measurements on the sheet and on the tool.. We are performing several measurements to determine the effects of heating on a sheet, and to understand the relationships among the aforementioned variables. We started to deal with sheet forming within the framework of a successfully completed EU FP VI.project (“SCULPTOR”) in collaboration with German and Spanish partners and we have since become world wide accepted experts in this area of research.
In our first ISF experiment, we are experimenting with heating a polymer sheet from one side (using the small robot) and forming it with an appropriate tool from the other side (the milling machine). The processes in this setup can be started and monitored in VirCA (Virtual Collaboration Arena), a loosely coupled modular, 3D Internet based interactive virtual environment for collaborative manipulation of robots and other hardware or software equipment [2],[3]. The VirCA system has been developed within HUNOROB, a Hungarian–Norwegian research based innovation project. Optical measurements for sheet thinning and thermal behaviour investigation are started.
In our second experiment we are investigating ISF of metal sheets with the FANUC robot using a spherical edge tool and the specific frame to hold the sheet.
Our third experiment aims to control the robot and the optical box to solve the magic cube (Rubik’s) puzzle by learning it and then by turning it to its requested positions/colours with the FANUC robot. The light box assists in the learning of the initial colours of all six sides of the cube, and then the same hole on the side of the box assists in turning it. This experiment allows us to investigate different mathematical algorithms to solve the cube using different robot movements, such as sudden deceleration or acceleration, travelling slowly or fast, and making different, complicated turns.
Some future plans:
- We plan to realize and test a recently submitted EU patent application (Device for Two Sided Incremental Sheet Forming) and a new adjustable sheet holder frame with the capacity to work with different sheet sizes.
- We plan an optical robot control to recognize and find and then grip and move known objects with the FANUC robot.
- Serious industrial experiments are planned for assembly, disassembly, part sorting and perhaps for point and line welding.
In conclusion, the laboratory will be able to take part in international cooperation as a real and a virtual laboratory, continuing our experiments and collaborating with the leading Spanish and German laboratories.
Links:
Incremental Sheet Forming: http://en.wikipedia.org/wiki/Incremental_sheet_forming
Rubik's Cube: http://en.wikipedia.org/wiki/Rubik%27s_Cube
CIM Lab. at SZTAKI: http://www.sztaki.hu/department/CIMLab/
Virtual Collaboration Arena: http://virca.hu
References:
[1] Imre Paniti, CAD API based tool path control for novel incremental sheet forming, Pollack Periodica, Volume 5, Number 2, August 2010, pp. 81-90.
[2] P. Galambos, VirCA as Virtual Intelligent Space for RT-Middleware, Proceedings of the 2nd International Conference on Cognitive Infocommunications, CogInfoCom 2011, 3-7 July 2011, pp. 140-145.
[3] János Nacsa, Imre Paniti, Sándor Kopácsi, Incremental Sheet Forming in Cyberspace - a Process Oriented Cognitive Robotics Application, Proceedings of the 2nd International Conference on Cognitive Infocommunications, CogInfoCom 2011, 3-7 July 2011, pp. 1-5.
Please contact:
György Kovács, SZTAKI, Hungary
Tel: +36 1 279 6140, E-mail: