





by Giacomo Indiveri (University of Zurich and ETH Zurich)
Artificial intelligence systems might beat you in a game of Go, but they still have serious shortcomings when they are required to interact with the real world. The NeuroAgents project is developing autonomous intelligent agents that can express cognitive abilities while interacting with the environment.
Tremendous progress is being made globally in machine learning, artificial intelligence (AI), and deep learning. In parallel, especially in Europe, there is a strong convergence of AI algorithms, neuroscience basic research and technology development.
However, despite this remarkable progress, artificial systems are still unable to compete with biological systems in tasks that involve processing sensory data acquired in real time in complex settings and interacting with the environment in a closed-loop setup. The NeuroAgents project is bridging this gap with basic and applied research in “neuromorphic” computing and engineering. Our team is combining the recent advancements in machine learning and neural computation with the latest developments in microelectronic and emerging memory technologies. We are designing autonomous systems that can express robust cognitive behaviour while interacting with the environment, through the physics of their computing substrate. In particular, the project is making inroads in understanding how to build “neuromorphic cognitive agents”, i.e., fully fledged artificial systems that can carry out complex tasks in uncontrolled environments, with low-level adaptive sensory processing abilities and high-level goal-oriented decision-making skills.
The project has two ambitious, tightly interlinked goals: (i) to study the principles of computation used by animal brains for building a disruptive neuromorphic computing technology, and (ii) to build electronic signal processing systems that use the same physics of computation used by biological neurons to better understand how animal brains compute.
The project started in September 2017 and is currently entering its final stages of research. The studies of neural computation and AI algorithms (the “mind” of the project) paralleled the design of a new neuromorphic processor chip (the “brain” of the project), which has been recently delivered and is now being tested. Meanwhile the “mind” algorithms and architectures were mapped on older generation neuromorphic processors produced in the previous NeuroP ERC project, and interfaced with robotic actuators (the “body” part of this project).
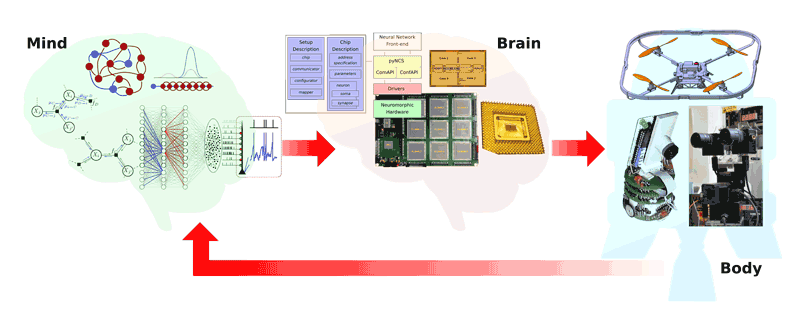
Figure 1: The mind, brain, and body parts of the NeuroAgents project: neural models and architectures are mapped onto neuromorphic processor chips. Neuromorphic sensors and processors are mounted on robotic platforms for real-time interaction with the environment. The models validated in real-world settings are refined, leading to new chip designs and applications in a virtuous loop.
The techniques employed combine the study of neural dynamics in recurrent networks of neurons measured from neuroscience experiments, with the simulation of spiking neural processing architectures on computers, and with the design of mixed-signal analogue/digital electronic circuits that emulate the properties of real neurons and synapses [1,2]. The theoretical neuroscience studies focus on perception, memory storage, decision-making and motor planning. The software simulations take the high-level results obtained from the theory and implement them using software spiking neural network simulators. The software is designed to incorporate the “features” of the electronic circuits used into the simulated neural networks. These features include restrictions such as limited resolution, noise, or the requirement to clip signals to only positive values (e.g., because voltages cannot go below the “ground” reference level and currents can only flow in one direction). The microelectronic techniques focus on the design of spike-based learning and plasticity mechanisms at multiple time scales, and of asynchronous event-based routing schemes for building large-scale networks of spiking neurons. The robotics activities include testing the models and the spiking neural network chips with neuromorphic sensors and motorised platforms (e.g., in active vision stereo setups) [3].
Future activities of the project involve connecting all the pieces together (i.e., mind, brain, and body), and applying the results and the know-how gained to practical “edge-computing” applications, i.e., applications in which the agent needs to respond to the data that is being sensed in real-time, with low power and without having to resort to cloud-based computing resources.
The final goal of developing brain-inspired sensing, processing, and cognitive architectures, all implemented with spiking neural network chips, is indeed within reach and the NeuroAgents project promises to produce very interesting results.
NeuroAgents is an ERC Consolidator project (No. 724295) hosted at the Institute of Neuroinformatics at the University of Zurich and ETH Zurich, Switzerland. The project has led to collaboration with many EU partners, including IBM Research Zurich; IIT Genova, Italy; CEA-LETI Grenoble, France; the University of Groningen, the Netherlands; Newcasdle University, UK; or the SME SynSense AG, Zurich Switzerland.
References:
[1] G. Indiveri and Y. Sandamirskaya: “The importance of space and time for signal processing in neuromorphic agents: the challenge of developing low-power, autonomous agents that interact with the environment”, IEEE Signal Processing Magazine 36.6 (2019): 16-28.
[2] A. Rubino, et al.: “Ultra-Low-Power FDSOI Neural Circuits for Extreme-Edge Neuromorphic Intelligence”, IEEE Transactions on Circuits and Systems I: Regular Papers, 2020.
[3] N. Risi, et al: “A spike-based neuromorphic architecture of stereo vision”, Frontiers in neurorobotics 14, (2020): 93.
Please contact:
Giacomo Indivieri
University of Zurich

