









by Amedeo Cesta, Gabriella Cortellessa, Lorenza Tiberio
We are currently working on a project, named ExCITE, the goal of which is to intensively evaluate a tele-presence robot against a wide spectrum of requirements of the elderly. This work is at the intersection of two emerging fields, Human-Robot Interaction (HRI) and Ambient Assisted Living (AAL), and involves both long term and cross-cultural user evaluation.
The Planning and Scheduling Team (PST) at the Institute for Cognitive Science and Technology (ISTC-CNR) is currently working within an AAL project called ExCITE whose goal is to adapt an existing tele-presence robotic platform to support the participation of elderly people in social life. The sense of isolation associated with increasing age is a very relevant issue for the elderly. Retirement, living far from family members and reduced physical ability may limit their ability to be socially engaged, which in turn may augment the risk of occurrence of cognitive deficits. The challenge of ExCITE is to carry out a set of fielded experiments with the elderly in their living environment, exploring the ability of the robot to reduce the sense of social isolation by bridging distances, facilitating interaction and communication.
The project reference platform is the mobile presence robot Giraff. The robot is a remotely controlled mobile, physical avatar, of human-height, integrated with a videoconferencing system (including a camera, display, speaker and microphone). Giraff is accessed and controlled via a standard computer/laptop over the Internet, using an application, called “the pilot”, downloadable for free. From a remote location, a person with quite limited computer training can “visit” a home and intuitively navigate Giraff in the environment.
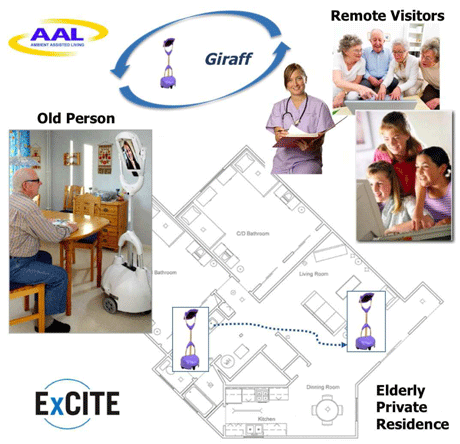
Figure 1: Giraff allows remote visitors (healthcare professionals and/or relatives and friends) to visit end-users in their living environment thus contributing to maintain social relationships and enabling home assistance to frail older adults.
ExCITE aims to allow the elderly to remain in their home environments, enabling loved ones and caregivers to maintain a higher level of communication and interaction with them. A number of individual, personal health and lifestyle factors may influence perceptions, expectations and acceptance of the Giraff robot. From the HRI point of view, ExCITE addresses a very difficult challenge: the challenge of moving laboratory experiments to real life settings involving real people. Most of the known experimental results have been either video-based or obtained in restricted and controlled laboratory settings. In contrast, Giraff, with its ease of use and technical robustness, makes possible a long-term fielded evaluation, unusual in robotic research. This scenario highlights an almost unique perspective offered by the project, but also underscores the potential difficulties that may be encountered given the high variability of experimental settings and the possible risk of technology abandonment after a first period of curiosity driven utilization.
We are responsible for the design and implementation of the field tests. We have selected qualitative and quantitative research techniques for the assessment of attitudes and individual perceptions of Giraff. The aim of the evaluation is twofold: to measure the usability of the interface from the pilot side, and also to assess acceptance, improvement of social isolation/loneliness, perceived usefulness, and engagement by the end-user.
Two different scenarios have been chosen as test cases in Italy: (i) a private home and (ii) a rehabilitation centre. In the first case, the Giraff is being placed in an elderly woman’s house for several months in order to assess its impact on daily routine in terms of improvement of social isolation/loneliness. The lady has a reduced mobility capability, lives with a caregiver and spends much of her time at home receiving weekly visits from her only daughter who lives in the same city. The woman has two other sons who live far away and Giraff would offer the possibility of increasing the frequency of contact with them through “virtual visits”.
The aim of the second test case is to validate the use of the Giraff robot as a tool for cognitive rehabilitation. This scenario poses even more challenging problems. For instance, before assessing the use of Giraff as a device for “remote cognitive rehabilitation” a preliminary assessment is needed in order to understand how patients with cognitive impairments feel about their interactions with the robot (“Are they scared? Would they accept it”?). The main objective of the clinical trial is to observe patient’s physiological stress response during interaction with the robot.
The ExCITE partners come from Italy, Spain and Sweden: Örebro University (coordinator), University of Malaga and CNR (research centres), Giraff AB (the robot manufacturers), RatioConsulta SpA (a software company), and the Örebro City Council as end-user representative. An additional project goal is to analyse the cross-cultural aspects involved in the use of this technology.
Links:
http://www.excite-project.eu
http://pst.istc.cnr.it
http://www.giraff.org
Please contact:
Amedeo Cesta
ISTC-CNR, Italy
Gabriella Cortellessa
ISTC-CNR, Italy
Lorenza Tiberio
ISTC-CNR, Italy
