









by Massimo Cossentino, Vincent Hilaire and Abder Koukam
Nobel Laureate Herbert Simon states: “Empirically a large proportion of the complex systems we observe in nature exhibit hierarchic structure.” Starting from this assertion we developed a novel approach for designing and implementing complex systems combining the multi-agent approach and the holonic social organization perspective.
This project is a collaboration between the Palermo department of the ICAR institute of the Italian National Research Council (CNR), and the SeT laboratory of the University of Belfort-Montbelliard (UTBM), France. It started in 2007 and it is still running today. This collaboration was the opportunity for several exchanges, and one researcher from ICAR/CNR spent a year and a half in Belfort within this activity.
Our starting point was that in the past, researchers have deployed a considerable effort in the analysis, modelling and implementation or simulation of complex systems. Their work improved the state of the art in understanding and designing software capable of simulating such systems. However, many of these systems fail to fully represent the real system they model. The aim of this project was to provide a natural, versatile and scalable representation dimension for such systems. Such a goal was pursued by adopting the holonic paradigm in the context of multi-agent systems (MASs).
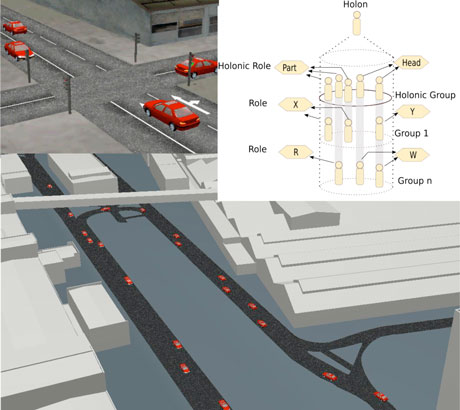
Figure 1: ASPECS has been succesfully employed for the simulation of a big industrial plant.
MASs naturally emphasize the importance of system properties such as autonomy, proactivity, social abilities and self-organization. These properties mean MASs are an obvious candidate for a paradigm for the design of complex systems. Indeed, this paradigm proposes new strategies for the analysis, modelling and implementation of such systems. Its elementary constituents are called ‘agents’, ie software entities which exhibit autonomous and flexible behaviours.
Complex systems are characterized by a large number of entities in interaction, exhibiting emergent behaviours. Nobel Laureate Herbert Simon states: "Empirically a large proportion of the complex systems we observe in nature exhibit hierarchic structure. On theoretical grounds we could expect complex systems to be hierarchies in a world in which complexity had to evolve from simplicity." Simon (1996)
This raises the question: if nature has selected this path, should scientists trying to model complex systems privilege it too? In this project we are interested in these hierarchical structures to analyse and model complex systems. More precisely, we explore the requirements and consequences of modelling complex systems using hierarchically composed agents.
In 1967 Arthur Koestler coined the term holon as an attempt to conciliate holistic and reductionist visions of the world. A holon represents a part-whole construct that can be seen both as a component of a higher-level system and as a whole composed of other holons as substructures.
We apply holonic-related concepts to systems which exhibit a kind of hierarchical structure, or which there are many types. Indeed, simulations of complex systems often need several levels of granularity with different time/geographical scales. We applied this approach to several problems with very good results. For instance, we simulated a big industrial plant. This plant has over 19 000 employees working in different shifts to ensure the plant is running 24 hours a day. Last year over 1600 trucks entered the plant every day. Geographically, three cities and a highway enclose the plant. Such a configuration makes it impossible to simply increase the plant's size to accommodate new buildings and forces the infrastructure to be redesigned. Due to the great number of constraints and interrelated dependencies between traffic and production, a simulation tool could prove to be of great help when evaluating different designs. Even the smallest modification in a plant of this size often requires a significant budget to be invested. A reliable simulator offers the possibility of detecting ‘side-effects’ prior to the project's validation.
Our main contribution is the definition of a methodology, namely ASPECS (Agent Specification Process for Complex Systems; see link below), and of a development and deployment platform, JANUS. The key concepts underlying the methodology and platform are based on organizational theories. We adopted this approach because it is largely recognized in the agent research community that an MAS should be conceived in terms of an organized society of individuals in which each agent plays specific roles and interacts with other agents. As pointed out by Ferber, the organizational approach offers a number of advantages and can contribute to agent-oriented software development through heterogeneity of languages, modularity, multiple possible architectures and security of applications.
ASPECS is structured in three phases or domains. The first, the Problem Domain, provides the organizational description of the problem independently of a specific solution. The concepts introduced in this domain are mainly used during the analysis phase and at the beginning of the design phase. The second domain, the Agency Domain, introduces agent-related concepts and provides a description of the holonic, multiagent solution resulting from a refinement of the Problem Domain elements. The third and last domain, the Solution Domain, is related to the implementation of the solution on a specific platform. This domain is thus dependent on a particular implementation and deployment platform. In our case, this part of the process is based on the JANUS platform that we specifically designed to ease the implementation of holonic and organizational models.
Links:
http://www.aspecs.org/
http://www.janus-project.org/
M. Cossentino, N. Gaud, V. Hilaire, S. Galland, A. Koukam. ASPECS: an Agent-oriented Software Process for Engineering Complex Systems. International Journal of Autonomous Agents and Multi-Agent Systems (IJAAMAS). 20(2). 2010.): http://www.pa.icar.cnr.it/cossentino/paper/Cossentino_ASPECS.pdf
Please contact:
Massimo Cossentino
ICAR-CNR
Tel: +39.23842257
E-mail:
